Polaris
Un producte de GMV, Polaris, simulador de volum de servei de rendiment GNSS
Simulador de rendiment de volum del servei GNSS
Polaris és un simulador de rendiment de volum del servei GNSS que proporciona els mitjans per demostrar els beneficis que s’obtenen amb una àmplia varietat de combinacions de sistemes GNSS i sensors en diferents entorns d’usuari.
Un usuari que no sigui expert en l’eina podrà avaluar el rendiment de qualsevol combinació dels dispositius de navegació estàndard en el seu entorn operatiu particular.
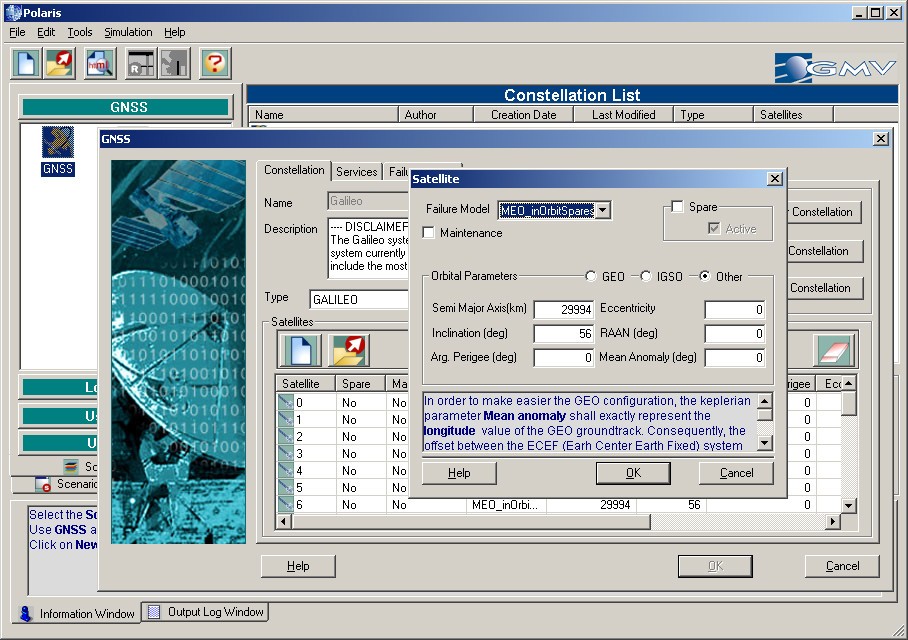
L’expert en navegació també tindrà l'avantatge afegit de poder ajustar els components individuals per a una anàlisi més rigorosa, particularment pel que respecta als elements GNSS i SBAS, gràcies a lainterfície d’usuari gràfica (GUI) avançadade Polaris.
Polaris s’ha dissenyat i optimitzat per funcionar en qualsevol ordinador d’escriptori o portàtil estàndard sota els sistemes operatius de Windows.
Per les condicions de concessió de llicències i la fixació de preus posis en contacte amb [email protected]
Característiques clau
Polaris proporciona un entorn avançat i intuïtiu per mostrar i exportar els resultats de simulació obtinguts de diferents maneres i formats.
Polaris admet una gran varietat de sistemes i sensors GNSS, que proporcionen configuracions predeterminades per a tots ells.
Els models de simulació implementats a Polaris s’han validat exhaustivament. Els models de simulació SBAS en particular s’han calibrat amb dades SBAS reals obtingudes des d’EGNOS i l’eina magicSBAS de GMV.
Procediment per a una configuració ràpida de Polaris per a l’avaluació del rendiment de GNSS
Per avaluar una aplicació, el primer que s’ha de fer és definir la combinació de sistemes i sensors a utilitzar, així com l’àrea de servei o la trajectòria.
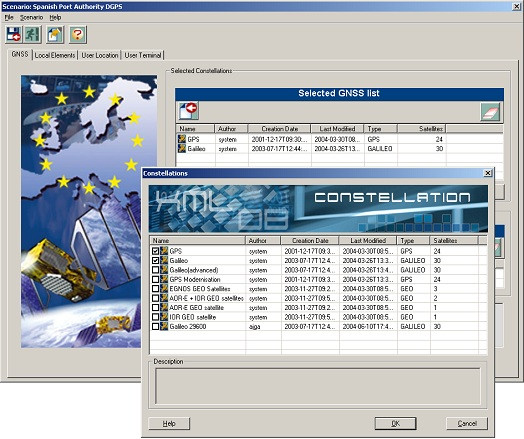
Seleccionar les augmentacions GNSS i regionals (SBAS) és bastant simple. Només agafi l’augmentació que desitja incloure des d’una llista. Afegir elements locals (GBAS, DGNSS, pseudolites, posicionament ràdio mòbil o balises) és també molt fàcil. Els elements locals s’organitzen en xarxes. Pot afegir una xarxa completa amb un simple clic, o elements locals individuals també.
També necessitarà definir la terminal d’usuari, inclosos els receptors GNSS/SBAS, i les característiques dels filtres i sensors.
Per completar la definició de l’escenari, seleccioni l’àrea de servei o trajectòria sobre la qual el rendiment de navegació s’avaluarà. Pot seleccionar una de la llista, o definir una durant la definició de l’escenari.
Ara pot executar múltiples anàlisis per a aquest escenari.
Resultats de simulació en diferents formats i maneres
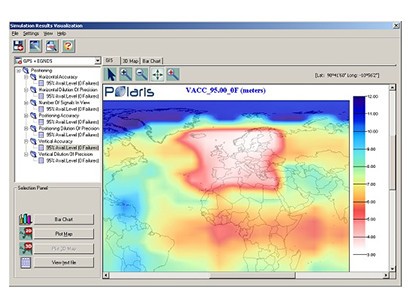
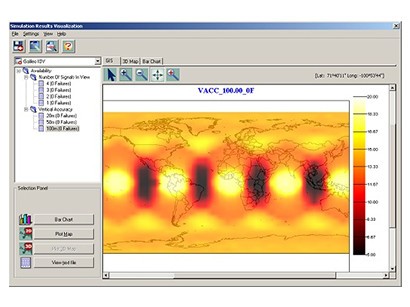
Polaris proporciona un entorn avançat i intuïtiu per mostrar i exportar els resultats de simulació obtinguts de diferents maneres, com:
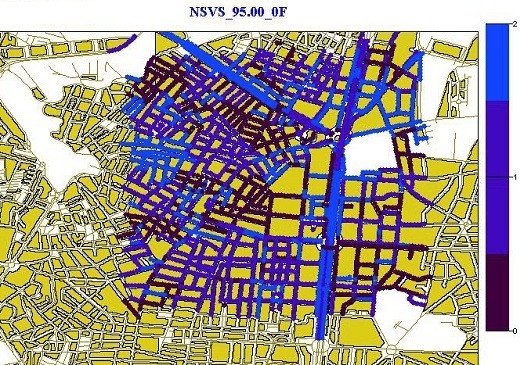
- Mapes de color generats amb el mòdul GIS, que es poden exportar a arxius gràfics (format JPEG)
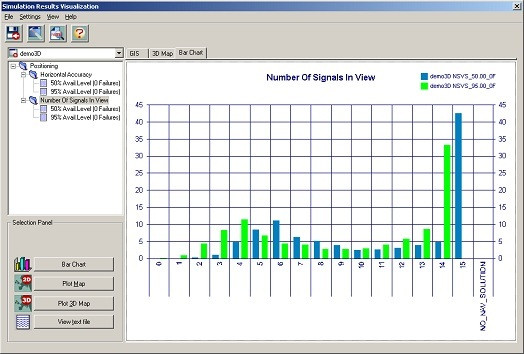
- Gràfics de barres per recopilar informació per a diferents xifres de mèrit (p. ex., diversos nivells de disponibilitat) o diferents escenaris (compensacions i anàlisis paramètriques).
- Els gràfics XY per representar l’evolució (p. ex., en les trajectòries) de les xifres de mèrit seleccionades.
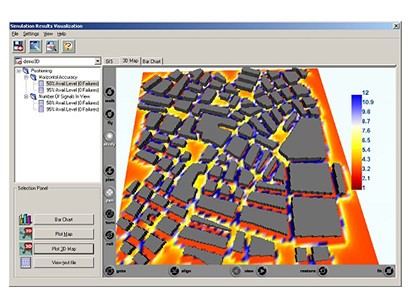
- Navegar a través d’entorns 3D que contenen resultats de simulació (utilitzant el llenguatge de marcat de realitat virtual, VRML).
- Crear informes HTML per a cada component, escenari o simulació definida en el sistema.
- Exportar-los a un PDA des de la GUI de Polaris.
- Exportar fàcilment els resultats de simulació a arxius de text pla, i postprocessar-los i representar-los amb el seu software favorit
Sistemes i sensors GNSS
Polaris admet una gran varietat de sistemes i sensors GNSS, que proporcionen configuracions predeterminades per a tots ells:
- Les constel·lacions GNSS, que inclouen constel·lacions globals com GPS, GLONASS, Galileo, i constel·lacions regionals com Compass o IRNSS.
- Sistema d’augmentació basat en satèl·lit (SBAS), com EGNOS, WAAS, MSAS, SDCM i GAGAN.
- Sistema d’augmentació basat en terra (GBAS).
Altres augmentacions locals que inclouen pseudolites i posicionament (GSM / GPRS / UMTS) ràdio mòbil:
- Una varietat de sensors de posicionament com hodòmetres, giroscopis, podòmetres, registres de velocitat, etc.
- Polaris proporciona configuracions predeterminades per a tots els sistemes i sensors compatibles que es poden utilitzar per a la creació ràpida d’escenaris de simulació.
A més, els usuaris tenen l’opció de definir elements utilitzant la interfície d’usuari gràfica (GUI) avançadade Polaris.
Projectes passats i futurs
Polaris ha tingut èxit en diferents projectes per a una varietat de clients:
- Extensió dels sistemes SBAS (EGNOS) a Sud-amèrica i Àfrica del Nord, en el marc del projecte GEM.
- Estudi de viabilitat ARMAS per a aplicacions per a peatges de carretera basades en GNSS.
- Estudi de viabilitat SCORE per a aplicacions per a vehicles i vianants per a les trucades d’emergència E-112.
- Estudi de viabilitat Advantis per a serveis de localització d’integritat garantida.
- Estudi de viabilitat GRAS (simulador d’aplicació per a carretera Galileo) per a sistemes i serveis telemàtics per a vehicles.
- Fase Galileo B i CDE1: polaris es va utilitzar per a l’assignació pressupostària d’error de rang i l’impacte esperat en l’àmbit d’usuari.
- Investigació de conceptes d’integritat alternativa.
- Projecte SACCSA per a l’OACI (Organització d’Aviació Civil Interna) per donar suport a l'anàlisi de viabilitat d’un sistema SBAS a Amèrica Llatina.
- Polaris es va utilitzar per a la definició de l’arquitectura de la xarxa d’estacions terrestres i per a l’avaluació del rendimentde navegació esperat.
- Transport de Londres (TfL):
- Predicció del rendiment de Galileo a Londres.
- Programa d’evolució GNSS europeu (PEGE), projecte CAGIR:
- Ús de la banda C per a sistemes GNSS.
- Programa d’evolució GNSS europeu (PEGE), projecte del sistema d’augmentació multiregional (SMR):
- Disposició dels serveis SBAS i de la integritat regional considerant les constel·lacions GNSS futures.
Estudis de viabilitat
Abans d’embarcar-se en revisions cares per als serveis de navegació existents és necessari saber per endavant quines millores es poden esperar, i quines podrien a la llarga no portar a avanços significatius.
Polaris es pot utilitzar des del principi de la fase de viabilitat per portar a terme compensacions entre les diferents opcions d’implementació (p. ex., es poden utilitzar tecnologies de posicionament) i anàlisis paramètriques per donar suport a estudis de viabilitat i rendibilitat.
Els resultats obtinguts es poden presentar d’una manera clara i comprensible per ajudar a prendre una decisió Go/No Go.
Per exemple, Polaris s’ha utilitzat per a aquest propòsit en diverses anàlisis de viabilitat encarregades per l’ESA i la Comissió Europea.
Aquests estudis tracten temes com la integració d’EGNOS a Galileo, i l’extensió d’EGNOS fora de l’àrea de la Conferència d’Aviació Civil Europea (CACE).
Connectar a usuaris potencials amb els dissenyadors del sistema/aplicació
El disseny del sistema/aplicació ha d'estar basat en els requisits de l’usuari. Connectar als usuaris potencials amb els dissenyadors del sistema/aplicació és essencial per assegurar que el producte final es converteixi en el que els usuaris finals realment necessiten. No obstant això, molts usuaris no tenen una formació tècnica en tecnologies de posicionament. En particular, això representa un problema seriós per a les anàlisis de mercat.
Polaris es pot utilitzar per mostrar als usuaris d’una manera clara com poden beneficiar-se d’un producte o solució determinada. Fent això serà més fàcil proporcionar feedback per a la definició i disseny del sistema/aplicació.
Els resultats de Polaris es poden utilitzar per preparar qüestionaris de sondeig de mercat, i es poden utilitzar per enquestar als usuaris durant les campanyes d'anàlisi de mercat. Polaris proporciona resultats de simulació de moltes formes gràfiques i intuïtives (mapes de color, gràfics X-Y, gràfics de barres, etc.), inclosos els escenaris 3D en el format VRML.
La interfície d’usuari gràfica s’ha dissenyat per a fer front a diferents nivells d’experiència, el que fa a Polaris l’eina ideal per enquestar a futurs usuaris. A més, Polaris es pot utilitzar fins i tot com una potent eina de formació a distància.
Validació
El propòsit principal de les simulacions per ordinador és validar les especificacions de nivell alt així com les de nivell baix.
Amb Polaris, podrà:
- Avaluar els rendiments de navegació inclosos els sistemes i sensors de navegació.
- Donar suport a la definició pressupostària del rendiment i l'optimització per perfeccionar els requisits pressupostaris del sistema i de l’error.
- Donar suport al disseny del sistema d’alt nivell.
- Provar si el disseny actual compleix amb els requisits del sistema/usuari o no.
- Optimitzar la infraestructura terrestre, en termes de nombre d’estacions, distribució i característiques.
- Contribuir a la planificació de la implementació del sistema.
- Contribuir a la validació del rendiment.
- Avaluar la mateixa aplicació amb diferents característiques de la terminal d’usuari (receptors GNSS, qualitat del sensor, etc.), infraestructura terrestre (nombre i distribució d’estacions DGNSS, pseudolites, etc.), el que permet estalviar en equips de demostració cars.
- Anticipar possibles evolucions del sistema (serveis addicionals, millores en la tecnologia, etc.), i el seu impacte en el disseny del sistema.
- Establir límits superiors per als diferents components d’error, comprovant l’impacte en els rendiments de navegació per a diferents aplicacions i en diferents entorns d’usuari.
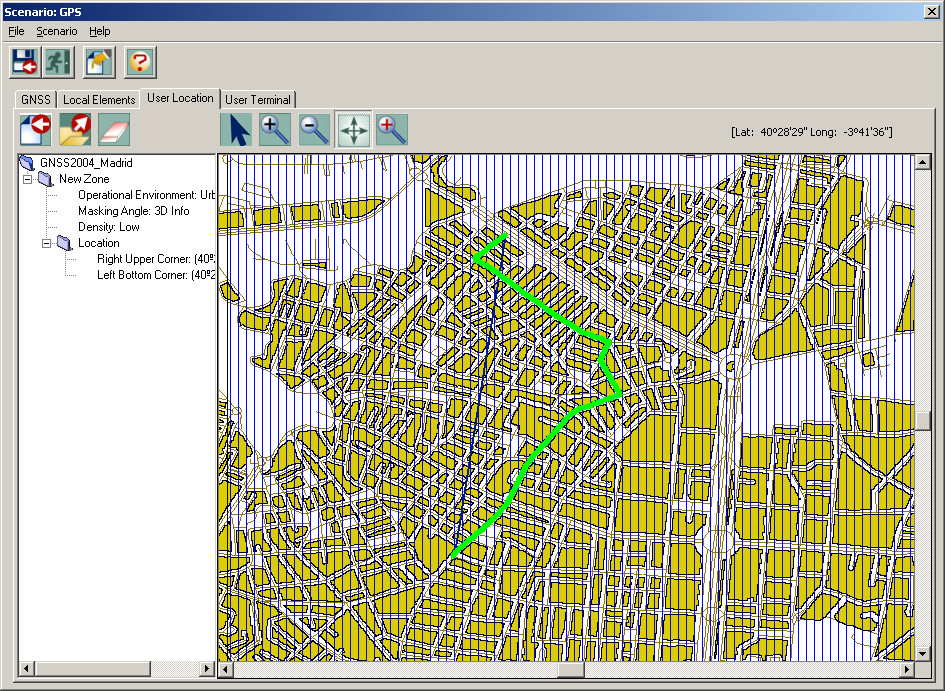
Avaluació de l’aplicació
Polaris pot avaluar aplicacions sobre les àrees de servei (xarxa de terminals d’usuari estàtiques) i al llarg de les trajectòries. En tots dos casos es pot definir utilitzant el mòdul GIS. Les trajectòries es poden definir seleccionant punts de ruta. Polaris calcularà la trajectòria més curta unint aquests punts de ruta. Ja que un nombre significatiu d’aplicacions tenen lloc en les àrees urbanes, on l’ocultació de les condicions dels angles afecta els rendiments de navegació, l’opció de simular entorns 3D (i, en particular, canyons urbans) és imprescindible.
L’ús de dades GIS 3D pot no ser justificat, tampoc fonamental, en alguns casos donat la despesa mitjana d’aquests mapes, com a l’avaluar una aplicació en un entorn urbà típic.
Per aquestes situacions, polaris inclou una eina per crear entorns 3D a partir dels mapes 2D GIS, la 3D Environments Tool Lite.