Polaris
A product by GMV, Polaris, GNSS Performance Service Volume Simulator
GNSS Service Volume Performance Simulator
Polaris is a GNSS Service Volume Performance Simulator that provides the means to demonstrate the benefits to be gained with a wide variety of combinations of GNSS systems and sensors in different user environments.
A non‑expert user of the tool will be able to assess the performance any combination of standard navigation devices in their particular operating environment.
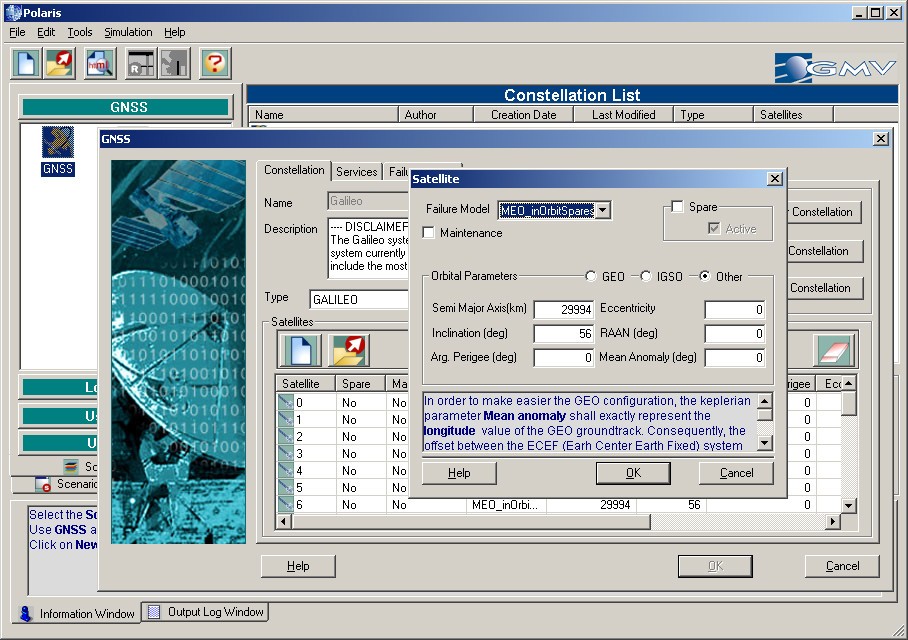
The navigation expert will also have the added advantage of being able to fine tune the individual components for a more rigorous analysis, particularly in terms of the GNSS and SBAS elements, thanks to the Polaris advanced Graphical User Interface (GUI).
Polaris has been designed and optimized to run on any standard desktop or laptop computer under Windows® operating systems.
For licensing conditions and pricing please contact [email protected]
Key features
Polaris provides a powerful and user-friendly environment to display and export the obtained simulation results in different manners and formats.
Polaris supports a large variety of GNSS systems and sensors, providing default configurations for all of them
The simulation models implemented in Polaris have been thoroughly validated. The SBAS simulation models in particular have been callibrated with real SBAS data obtained from EGNOS and GMV's magicSBAS tool.
Procedure for quick configuration of Polaris for GNSS performance assessment
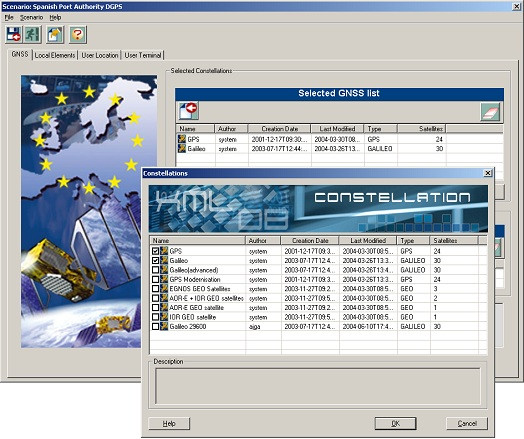
In order to evaluate an application, the first thing to do is to define the combination of systems and sensors to be used, as well as the service area or trajectory.
Selecting the GNSS and regional (SBAS) augmentations is quite simple. Just pick up the augmentation you want to include from a list. Adding Local Elements (GBAS, DGNSS, pseudolites, radio mobile positioning or balises) is also very easy. Local Elements are organised in networks. You can add an entire network with a simple click, or individual local elements as well.
You will also need to define the user terminal, including GNSS/SBAS receivers, and filters and sensors characteristics.
To complete the scenario definition, select the service area or trajectory over which navigation performance will be assessed. You can select one from the list, or define one during scenario definition.
Now you can run multiple analyses for that scenario.
Simulation results in different formats and manners
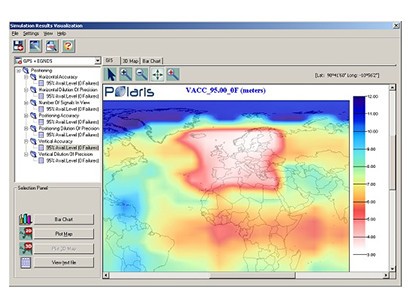
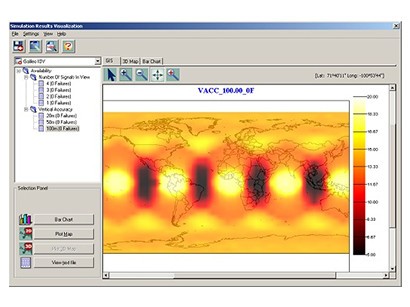
Polaris provides a powerful and user-friendly environment to display and export the obtained simulation results in different manners, such as:
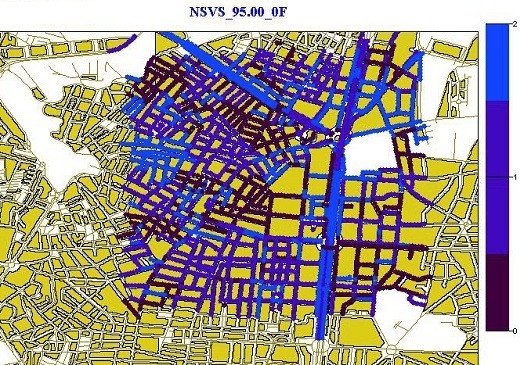
- Colored maps generated with the GIS module, which can be exported to graphic files (JPEG format)
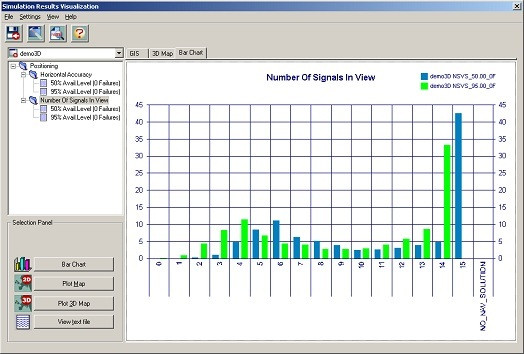
- Bar charts to gather information for different Figures of Merit (e.g., several availability levels) or different scenarios (trade-offs and parametric analyses).
- XY-Plots to represent the evolution (e.g.; along trajectories) of the selected Figures of Merit.
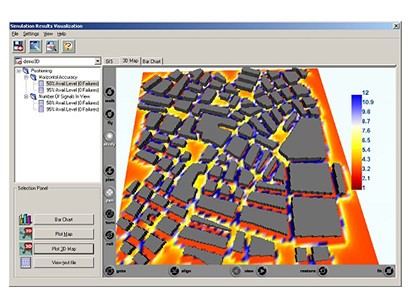
- Navigate through 3D environments containing simulation results (using the Virtual Reality Mark-up Language, VRML).
- Generate HTML reports for each component, scenario or simulation defined in the system.
- Export them to a PDA from Polaris GUI.
- Easily export simulation results to plain text files, and post-process and represent them with your favourite software.
GNSS systems and sensors
Polaris supports a large variety of GNSS systems and sensors, providing default configurations for all of them:
- GNSS constellations, including global constellations such as GPS, GLONASS, Galileo, and regional constellations such as Compass or IRNSS.
- Satellite Based Augmentation Systems (SBAS), like EGNOS, WAAS, MSAS, SDCM and GAGAN.
- Ground Based Augmentation Systems (GBAS).
Other local augmentations, including pseudolites and radio mobile (GSM / GPRS / UMTS) positioning:
- A variety of positioning sensors such as odometers, gyroscopes, pedometers, speed logs, etc.
- Polaris provides default configurations for all the supported systems and sensors that can be used for quick creation of simulation scenarios.
In addition, users have the option to define elements using the Polaris advanced Graphical User Interface (GUI).
Past and current projects
Polaris has been successful in different projects for a variety of customers:
- Extension of SBAS systems (EGNOS) to South-America and North-Africa, in the frame of the GEM project.
- ARMAS feasibility study for road tolling applications based on GNSS.
- SCORE feasibility study for vehicle and pedestrian applications for E-112 emergency calls.
- ADvantis feasibility study for centralised guaranteed integrity localisation services.
- GRAS (Galileo Road Application Simulator) feasibility study for in-car telematic systems and services.
- Galileo B and CDE1 Phase: polaris was used for ranging error budget allocation and expected impact at user level. Investigation of alternative integrity concepts.
- SACCSA project for ICAO (Internal Civil Aviation Organization) to support the feasibility analysis of an SBAS system in Latin America. Polaris was used for the architecture definition of the ground station network and for the assessment of the expected navigation performance.
- Transport for London (TfL): Prediction of Galileo performance in London.
- European GNSS Evolution Programme (EGEP), CAGIR project: Use of C band for GNSS systems.
- European GNSS Evolution Programme (EGEP), Multi-Regional augmentation System (MRS) project: Provision of SBAS services and regional integrity considering the future GNSS constellations.
Feasibility Studies
Before embarking on costly reviews to the existing navigation services it is necessary to know in advance what enhancements can be expected, and which may ultimately not lead to significant improvements.
Polaris can be used from the very beginning of the feasibility phase to perform trade-offs between different implementation options (e.g., positioning technologies to be used) and parametric analyses to support feasibility and cost-benefit studies.
The obtained results can be presented in a clear and understandable manner to help making a Go/No Go decision.
For instance, Polaris has been used for this purpose in several feasibility analyses commissioned by ESA and the European Commission. These studies addressed issues such as the integration of EGNOS into Galileo, and the extension of EGNOS outside the European Civil Aviation Conference (ECAC) area.
Linking potential users with system/application designers
System/application design has to be driven by user requirements. Linking potential users with system/application designers is essential to ensure that the final product becomes what the final users truly need. However many users do not have a technical background on positioning technologies. In particular, this represents a serious problem for market analyses.
Polaris can be used to show users in a clear manner how they can benefit from a given product or solution. Doing so it will be easier for them to provide feedback for system/application definition and design.
Polaris results can be easily used to prepare market surveying questionnaires, and can itself be used for surveying users during market analysis campaigns.
Polaris provides simulation results in many user-friendly graphical ways (coloured maps, X-Y plots, bar charts, etc.), including 3D scenarios in the VRML format. The Graphical User Interface has been designed to cope with different levels of expertise, which makes Polaris the ideal tool to survey future users. Moreover, Polaris can be even used as a powerful e-learning tool.
Validation
The primary purpose of computer simulations is to validate the high level as well as the low level specifications.
With Polaris, you will be able to:
- Evaluate navigation performances including both navigation systems and sensors.
- Support performance budget definition and optimisation to refine system and error budgets requirements.
- Support high-level system design.
- Test whether current design meets system/user requirements or not.
- Optimise ground infrastructure, in terms of number of stations, distribution and characteristics.
- Contribute to system deployment planning.
- Contribute to performance validation.
- Evaluate the same application with different user terminal characteristics (GNSS receivers, sensor quality, etc.), ground infrastructure (number and distribution of DGNSS stations, pseudolites, etc.), allowing savings in costly demonstration equipment.
- Anticipate possible system evolutions (additional services, technology improvements, etc) and their impact on system design.
- Establish upper bounds for the different error components, checking their impact on navigation performances for different applications and in different user environments.
Application evaluation
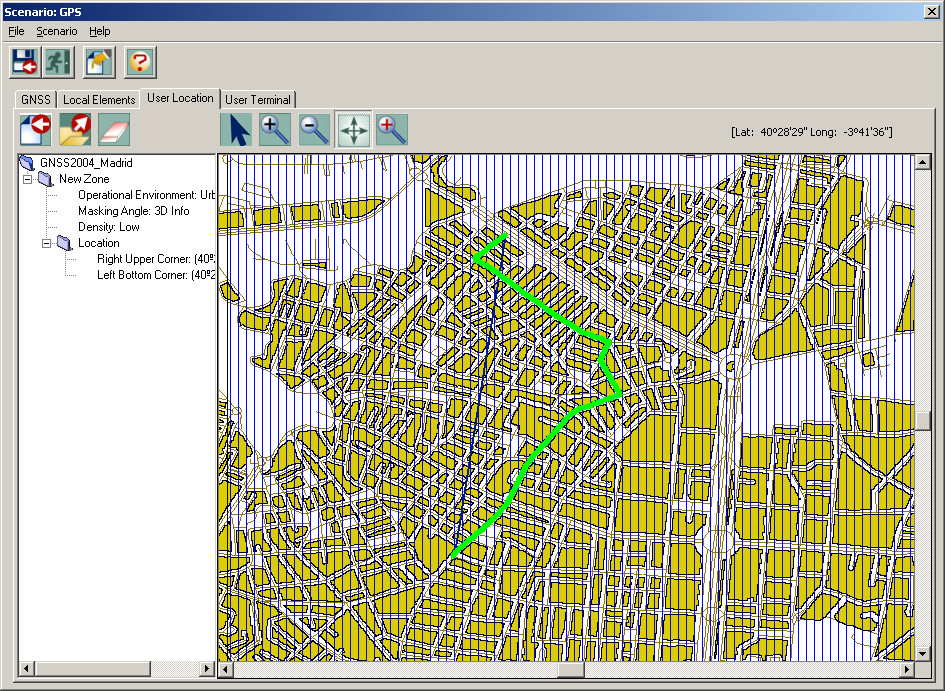
Polaris can evaluate applications both over service areas (grid of static user terminals) and along trajectories. In both cases they can be defined using the GIS module.
Trajectories can be defined just by selecting waypoints. Polaris will compute the shortest trajectory joining those waypoints.
Since a significant number of applications take place in urban areas, where masking angle conditions affect navigation performances, the option of simulating 3D environments (and, in particular, urban canyons) is a must. The use of 3D GIS data may not be justified, nor critical, in some cases given the average expense of such maps, such as when evaluating an application in a typical urban environment. For those situations, polaris includes a tool to create 3D environments starting from 2D GIS maps, the 3D Environments Tool Lite