XKY
Nowy i niezawodny system operacyjny z partycjami
Hiperwizor XKY
XKY jest systemem operacyjnym czasu rzeczywistego z partycjami czasowymi i przestrzennymi (RTOS), zgodnym ze standardem ARINC 653. Został on zaprojektowany zgodnie ze standardem DO-178C/ED-12C, aby zaoferować platformę systemów zintegrowanej awioniki modułowej dla wszystkich poziomów zintegrowanych w obrębie statków powietrznych, aż do poziomu DAL-A.
Od samego początku system operacyjny XKY został zaprojektowany i stworzony z zamysłem wykorzystania architektury hiperwizora oraz z myślą o zminimalizowaniu bazy kodu przy jednoczesnym spełnieniu rzetelnych wymogów w zakresie partycjonowania.
Ponadto, łączy modułowość i elastyczność z minimalnym wpływem na system, co czyni z niego korzystne ekonomicznie rozwiązanie dla rynku aeronautycznego.
XKY funkcjonuje na 32-bitowych i 64-bitowych procesorach PowerPC z obsługą wielu rdzeni i 32-bitowym ARM Cortex A8/ARMv7-A. Ponadto, dzięki swojej modułowej konstrukcji, można go łatwo dostosować do innych typów procesorów za pomocą odpowiednio dostosowanego BSP.
Aby uzyskać więcej informacji, prosimy o kontakt pod adresem [email protected].
Przypadki użycia: Prosimy zapoznać się z dokumentacją techniczną produktu, zawierającą szczegółowe informacje o produkcie XKY, a także studium przypadku, przeprowadzone wspólnie z koncernem Embraer.
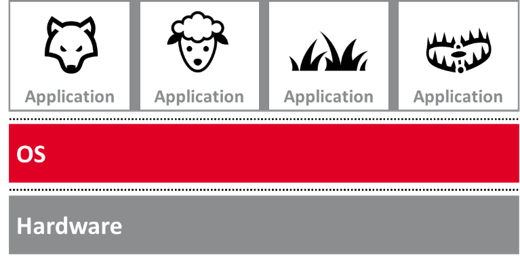
XKY to system operacyjny czasu rzeczywistego, utworzony od podstaw i zgodny z najczęściej stosowanym obecnie paradygmatem w zakresie awioniki modułowej (IMA): wytrzymałych partycji czasowo-przestrzennych. W skład jego konstrukcji wchodzi architektura hiperwizora, umożliwiając bezpieczne współistnienie na tym samym sprzęcie wielu różnych aplikacji, a nawet systemów operacyjnych. Rdzeń zarządzający partycjami XKY i odpowiednio dostosowany BSP działają bezpośrednio na sprzęcie, aby kontrolować i zarządzać aplikacjami i systemami operacyjnymi gości.
XKY umożliwia funkcjonowanie wielu systemów operacyjnych na różnych partycjach, zapewniając w ten sposób nieprzerwany dostęp do zasobów tychże systemów, skonfigurowanych w fazie projektowania. XKY jest zoptymalizowany pod kątem kompatybilności z systemami czasu rzeczywistego, a zwłaszcza z RTOS.
XKY obsługuje przetwarzanie wielordzeniowe. Partycje można zaprogramować na dowolnej liczbie rdzeni przetwarzania, określając procesor, na którym powinna działać bieżąca partycja.
XKY zapewnia szybki tryb komunikacji pomiędzy aplikacjami w obrębie każdej partycji przy użyciu portów próbkowania i kolejkowania oraz pamięci współdzielonej.
XKY obsługuje komunikację zewnętrzną przez PCIe i Ethernet. Interfejsy te działają w sposób bezpośredni, bez konieczności wykonywania dodatkowych czynności. W obrębie konkretnych partycji można również łatwo zintegrować inne sterowniki IO.
XKY zzapewnia zgodność z normą ARINC 653 APEX, część 1 (załączniki 3 i 4) oraz z niektórymi usługami z części 2.
Obecnie XKY dysponuje pakietem BSP gotowym do użycia na 32-bitowym i 64-bitowym procesorze PowerPC z obsługą wielu rdzeni i 32-bitowym ARM Cortex A8/ARMv7-A.
System XKY może zostać zatwierdzony w drodze certyfikacji jako platforma na statkach powietrznych, zgodna z przepisami DO-178C/ED-12C do poziomu DAL-A.
Obecnie pracujemy nad sporządzeniem dogłębnej i wyczerpującej dokumentacji systemu XKY, aby zapewnić jego zgodność z przepisami DO-178C/ED-12C aż do poziomu DAL-A. Dlatego możliwe jest wykorzystanie XKY, aby zapewnić jego zgodność z przepisami DO-178C/ED-12C aż do poziomu DAL-A. Dlatego możliwe jest wykorzystanie XKY jako platformy wsparcia w najistotniejszych homologowanych systemach lotniczych aeronautyki cywilnej i wojskowej. Już jest udostępniona do wglądu podstawowa dokumentacja tego produktu.
W przypadku pytań związanych z certyfikacją prosimy o kontakt pod adresem [email protected].

Akronim DIMA oznacza Distributed Integrated Modular Avionics. Rozproszona Zintegrowana awionika modułowa (DIMA), zwana czasem IMA drugiej generacji, to nowy wzorzec architektoniczny w sektorze awioniki.
Od 2014 roku firma GMV współpracuje z koncernem Embraer nad szeregiem projektów mających na celu wdrożenie prototypu platformy DIMA. Platforma ta zapewnia:
- Elastyczne wykorzystanie zasobów IO
- Interoperacyjność na poziomie systemowym
- Ponowne wykorzystanie aplikacji oprogramowania
- Rekonfigurację (plug & play)
Jeśli sobie tego Państwo życzą, mogą pobrać dokumentację techniczną dotyczącą konkretnego przypadku użycia.
GMV przedstawia zestaw startowy Xky in a Box
Jest to ekonomiczne rozwiązanie umożliwiające dokonywanie oceny, opracowywanie wersji demonstracyjnych, tworzenie prototypów, szkolenie się i wykonywanie innych czynności, które nie są bezpośrednio związane z procesem ewaluacyjnym.
Zestaw startowy zawiera system XKY BSP (pakietem obsługi płyty) BeagleBone Black - przystępnej cenowo płyty z utrzymywanym przez społeczność procesorem ARM Cortex A8/ARMv7-A..
Zestaw składa się ze skompresowanego pliku na pendrivie, zawierającego:
- XKY (rdzeń i BSP) skompilowany dla płyty Beaglebone Black
- Aplikację dla partycji IO, która zapewnia komunikację UDP przez Ethernet
- Narzędzia programistyczne (narzędzia konfiguracyjne oparte na języku programowania Python oraz łańcuch narzędzi kompilacyjnych oparty na systemie operacyjnym GNU)
- Przykładowe aplikacje
Zestaw startowy jest optymalnym rozwiązaniem do realizacji projektów badawczych i służącym do celów edukacyjnych i jest on bezpłatny dla uniwersytetów i innych placówek edukacyjnych.
SIMA (Simulated Integrated Modular Avionics - Symulowana Zintegrowana Awionika Modułowa) to środowisko uruchomieniowe dla systemów IMA (Zintegrowanej Awioniki Modułowej), opartych na specyfikacji ARINC 653. Zapewnia solidne partycjonowanie i wszechstronne narzędzie APEX utworzone zgodnie ze specyfikacją ARINC 653 dla systemów operacyjnych niebędących w stanie działać samodzielnie.
SIMA stanowi ekonomiczną alternatywę do debugowania, testowania, symulacji i kształcenia się w zakresie systemów IMA. Gwarantuje ona, że aplikacja działa tak samo, jak na platformie docelowej, dzięki ścisłemu i dowiedzionemu przestrzeganiu specyfikacji ARINC 653.
Norma ARINC 653 ustanawia specyficzny interfejs programowania dla systemów operacyjnych czasu rzeczywistego (RTOS) oraz konkretną metodę partycjonowania zasobów według czasu i pamięci. Obecnie norma ta jest uważana za fundamentalną podstawę do opracowywania systemów w sektorze lotniczym, w którym kwestia bezpieczeństwa odgrywa kluczową rolę.