Polaris
Produkt GMV, Polaris – symulator wydajności usługi GNSS
Symulator wydajności usługi GNSS
Polaris to symulator wydajności usługi GNSS, który umożliwia zaprezentowanie korzyści, jakie można osiągnąć dzięki szerokiej gamie kombinacji systemów i czujników GNSS w różnych środowiskach użytkowników.
Niewyspecjalizowany użytkownik będzie mógł ocenić działanie dowolnej kombinacji standardowych urządzeń nawigacyjnych w swoim konkretnym środowisku pracy.
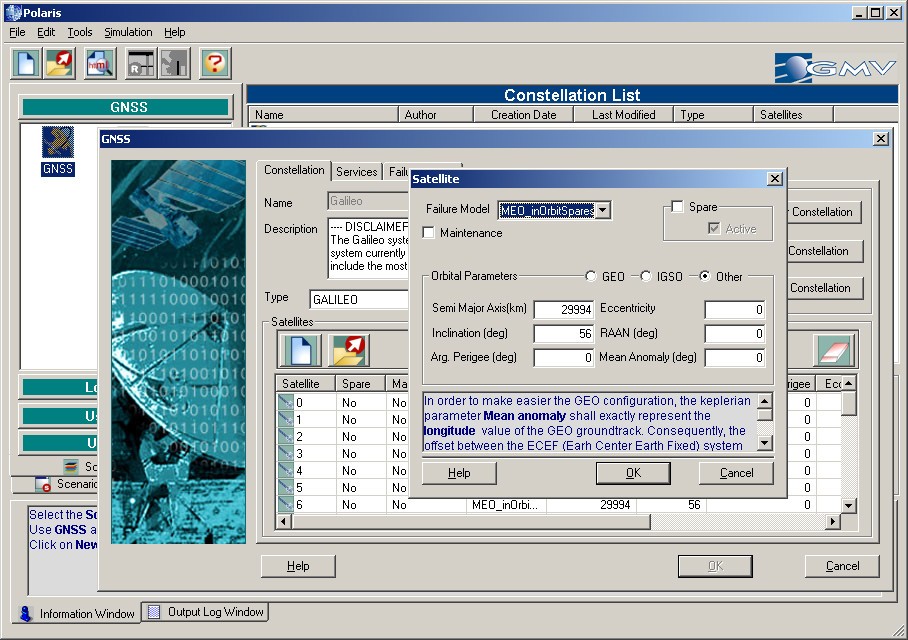
Ekspert w dziedzinie nawigacji będzie miał również dodatkową możliwość dostosowania poszczególnych komponentów do bardziej szczegółowej analizy, zwłaszcza w odniesieniu do elementów GNSS i SBAS, dzięki zaawansowanemu graficznemu interfejsowi użytkownika (GUI) Polaris.
Polaris został zaprojektowany i zoptymalizowany do pracy na każdym standardowym komputerze stacjonarnym lub laptopie z systemem operacyjnym Windows®.
W celu poznania warunków udzielania licencji oraz ceny prosimy o skontaktowanie się z nami pod adresem [email protected].
Główne zalety
Polaris zapewnia wydajne i przyjazne dla użytkownika środowisko do wyświetlania i eksportowania uzyskanych wyników symulacji na różne sposoby i w różnych formatach.
Polaris obsługuje wiele różnych systemów i czujników GNSS, zapewniając domyślne konfiguracje dla wszystkich z nich.
Modele symulacyjne wdrożone w symulatorze Polaris poddano szczegółowej weryfikacji. W szczególności modele symulacyjne SBAS zostały skalibrowane przy użyciu rzeczywistych danych SBAS uzyskanych z systemu EGNOS oraz narzędzia magicSBAS firmy GMV.
Procedura szybkiej konfiguracji systemu Polaris do oceny wydajności GNSS
Aby ocenić zastosowanie, należy przede wszystkim zdefiniować kombinację systemów i czujników, które mają zostać użyte, jak również obszar usługi lub trasę dla niej.
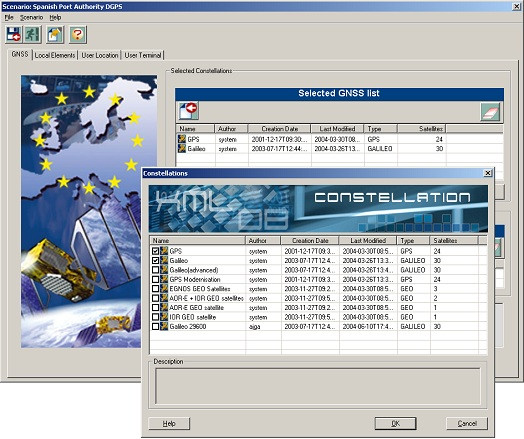
Wybór systemów wspomagających GNSS oraz regionalnych (SBAS) jest dość prosty. Wystarczy wybrać z listy system wspomagający, który chce się włączyć. Dodawanie elementów lokalnych (GBAS, DGNSS, pseudolitów, radiowego pozycjonowania mobilnego czy beaconów) jest również bardzo łatwe. Elementy lokalne są zorganizowane w sieciach. Za pomocą jednego kliknięcia można dodać całą sieć lub poszczególne elementy lokalne.
Należy również zdefiniować terminal użytkownika, w tym odbiorniki GNSS/SBAS, oraz filtry i cechy czujników.
W celu zakończenia definiowania scenariusza należy wybrać obszar usługi lub trasę, na której oceniana będzie wydajność nawigacji. Można wybrać jedno z nich z listy lub określić podczas definiowania scenariusza.
Teraz można przeprowadzić wiele analiz dla tego scenariusza.
Wyniki symulacji prezentowane w różnych formatach i na różne sposoby
Polaris zapewnia wydajne i przyjazne dla użytkownika środowisko do wyświetlania i eksportowania uzyskanych wyników symulacji na różne sposoby, takie jak:
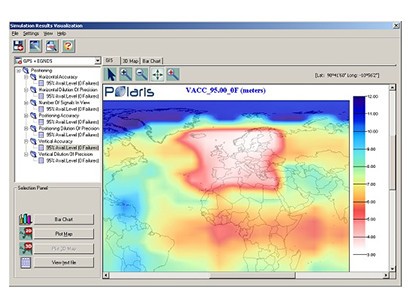
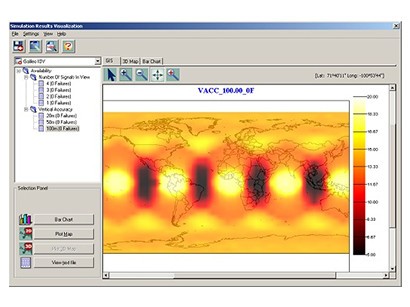
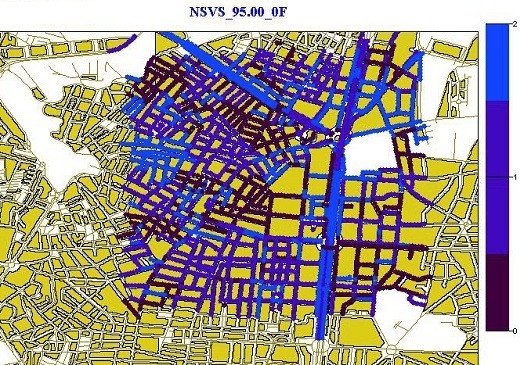
- kolorowe mapy generowane za pomocą modułu GIS, które mogą być eksportowane do plików graficznych (format JPEG);
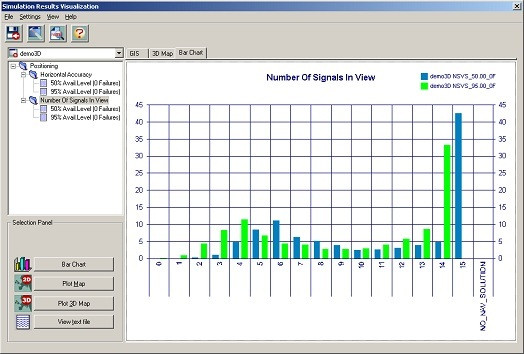
- wykresy słupkowe do podsumowania informacji dla różnych współczynników jakości (np. kilka poziomów dostępności) lub różnych scenariuszy (kompensacje i analizy parametryczne);
- wykresy XY do przedstawienia ewolucji (np. wzdłuż trasy) wybranych współczynników jakości;
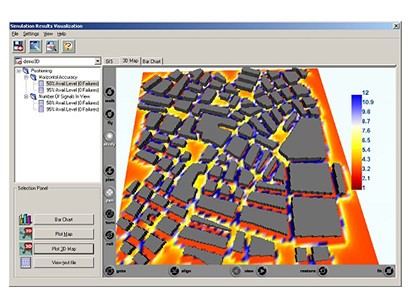
- nawigacja w środowiskach 3D zawierających wyniki symulacji (przy użyciu języka VRML);
- generowanie raportów HTML dla każdego komponentu, scenariusza lub symulacji zdefiniowanych w systemie;
- eksportowanie ich do urządzenia PDA z graficznego interfejsu (GUI) Polaris;
- łatwe eksportowanie wyników symulacji do zwykłych plików tekstowych oraz ich przetwarzanie i przedstawianie za pomocą preferowanego oprogramowania.
Systemy i czujniki GNSS
Polaris obsługuje wiele różnych systemów i czujników GNSS, zapewniając domyślne konfiguracje dla wszystkich z nich:
- konstelacje GNSS, w tym konstelacje globalne, takie jak GPS, GLONASS, Galileo, oraz konstelacje regionalne, takie jak Compass czy IRNSS;
- Satelitarne Systemy Wspomagające (SBAS), takie jak EGNOS, WAAS, MSAS, SDCM i GAGAN;
- Naziemne Systemy Wspomagające (GBAS).
Inne lokalne systemy wspomagające, w tym pseudolity i pozycjonowanie radiowe (GSM/GPRS/UMTS):
- różnorodne czujniki pozycjonujące, takie jak drogomierze, żyroskopy, krokomierze, rejestratory prędkości itp.;
- Polaris zapewnia domyślne konfiguracje dla wszystkich obsługiwanych systemów i czujników, które mogą być wykorzystane do szybkiego tworzenia scenariuszy symulacyjnych.
Dodatkowo użytkownicy mają możliwość definiowania elementów za pomocą zaawansowanego graficznego interfejsu użytkownika (GUI) Polaris.
Projekty realizowane w przeszłości i obecnie
Polaris z powodzeniem wykorzystany został w wielu projektach dla różnych klientów:
- Rozszerzenie systemów SBAS (EGNOS) na Amerykę Południową i Afrykę Północną, w ramach projektu GEM.
- Studium wykonalności ARMAS dla aplikacji poboru opłat drogowych opartych na GNSS.
- Studium wykonalności SCORE dla aplikacji dla pojazdów i pieszych do wykonywania połączeń alarmowych E-112.
- Studium wykonalności Advantis dla scentralizowanych usług lokalizacyjnych o gwarantowanej integralności.
- Studium wykonalności GRAS (symulator zastosowań drogowych Galileo) dla samochodowych systemów i usług telematycznych.
- Faza Galileo B i CDE1: system Polaris został wykorzystany do alokacji budżetu na błąd zakresu oraz do oszacowania przewidywanego wpływu na poziomie użytkownika; badanie alternatywnych koncepcji integralności.
- Projekt SACCSA dla ICAO (Organizacji Międzynarodowego Lotnictwa Cywilnego), mający na celu wsparcie analizy wykonalności systemu SBAS w Ameryce Łacińskiej. Polaris został wykorzystany do zdefiniowania architektury sieci stacji naziemnych oraz do oceny oczekiwanej wydajności nawigacyjnej.
- Transport w Londynie (TfL) – prognoza wydajności systemu Galileo w Londynie.
- Europejski program rozwoju GNSS (EGEP), projekt CAGIR – wykorzystanie pasma C dla systemów GNSS.
- Europejski program rozwoju GNSS (EGEP), projekt dotyczący wieloregionalnego systemu wspomagającego (MRS) – świadczenie usług SBAS i zapewnianie integralności regionalnej z uwzględnieniem przyszłych konstelacji GNSS.
Studia wykonalności
Przed przystąpieniem do kosztownych przeglądów istniejących usług nawigacyjnych należy z góry określić, jakich ulepszeń można się spodziewać, a jakie mogą ostatecznie nie doprowadzić do znaczącej poprawy.
Polaris może być wykorzystywany od samego początku fazy wykonalności do przygotowywania zestawień różnych opcji realizacji (np. technologii pozycjonowania, które mają być zastosowane) czy też przeprowadzania analiz parametrycznych w celu wsparcia studiów wykonalności oraz studiów dotyczących kosztów i korzyści.
Uzyskane wyniki są przedstawiane w jasny i zrozumiały sposób, aby pomóc w podjęciu decyzji w kwestii wyboru opcji.
Polaris został wykorzystany do tego celu na przykład w kilku analizach wykonalności zleconych przez ESA i Komisję Europejską. Badania te dotyczyły takich zagadnień jak włączenie systemu EGNOS do systemu Galileo oraz rozszerzenie systemu EGNOS poza obszar Europejskiej Konferencji Lotnictwa Cywilnego (ECAC).
Łączenie potencjalnych użytkowników z projektantami systemów/aplikacji
Projekt systemu/aplikacji musi być oparty na wymogach użytkownika. Łączenie potencjalnych użytkowników z projektantami systemów/aplikacji jest niezbędne, aby zagwarantować, że produkt końcowy spełnia rzeczywiste potrzeby użytkowników końcowych. Wielu użytkowników nie ma jednak technicznego doświadczenia w zakresie technologii pozycjonowania. Stanowi to poważny problem w szczególności dla analiz rynkowych.
Można wykorzystać Polaris do pokazania użytkownikom w jasny sposób, jakie korzyści wiążą się z danym produktem lub rozwiązaniem. W ten sposób łatwiej będzie im przekazać informacje zwrotne dotyczące definiowania i projektowania systemu/aplikacji.
Wyniki z narzędzia Polaris mogą służyć do przygotowania kwestionariuszy badań rynkowych, a sam system można wykorzystać do badania użytkowników podczas kampanii analizy rynku. Polaris dostarcza wyniki symulacji w wielu przyjaznych dla użytkownika formach graficznych (kolorowe mapy, wykresy XY, wykresy słupkowe itp.), w tym w formie scenariusza 3D w formacie VRML.
Graficzny interfejs użytkownika został zaprojektowany tak, aby sprostać różnym poziomom doświadczenia, co sprawia, że Polaris jest idealnym narzędziem do badania przyszłych użytkowników.
Co więcej, system Polaris może być nawet używany jako efektywne narzędzie e-learningowe.
Walidacja
Podstawowym celem symulacji komputerowych jest walidacja specyfikacji wysokiego i niskiego poziomu.
Za pomocą systemu Polaris można:
- oceniać wydajność nawigacji, w tym zarówno systemów nawigacji, jak i czujników;
- wspierać określanie budżetu oraz optymalizację w zakresie wydajności w celu dopracowania wymogów dotyczących budżetu systemu i błędów;
- wspierać projektowanie systemu wysokiego poziomu;
- sprawdzać, czy obecny projekt spełnia wymogi systemu/użytkownika, czy też nie;
- zoptymalizować infrastrukturę naziemną pod względem liczby stacji, rozmieszczenia i charakterystyki;
- wspierać planowanie wdrożenia systemu;
- wspierać weryfikację wydajności;
- oceniać to samo zastosowanie przy różnych charakterystykach terminali użytkownika (odbiorniki GNSS, jakość czujników itp.), infrastruktury naziemnej (liczba i rozmieszczenie stacji DGNSS, pseudolitów itp.), co pozwala zaoszczędzić na kosztownym sprzęcie demonstracyjnym;
- przewidywać ewentualne zmiany w systemie (dodatkowe usługi, ulepszenia technologiczne itp.), a także ich wpływ na budowę systemu;
- ustalić górne granice dla różnych składników błędów, sprawdzając ich wpływ na wydajność nawigacji dla różnych zastosowań i w różnych środowiskach użytkowników.
Ocena zastosowania
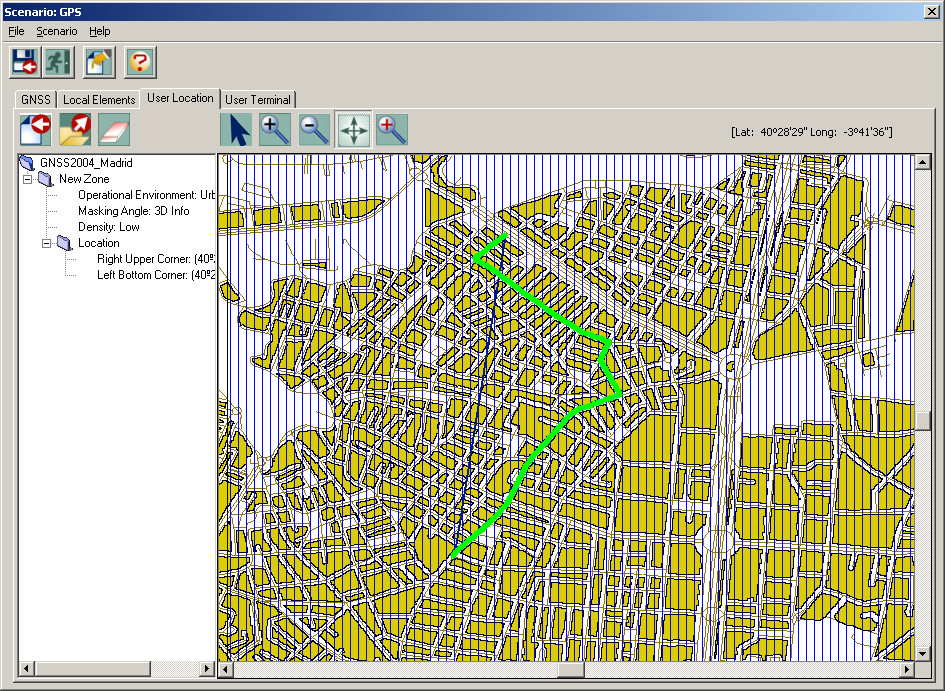
Polaris może oceniać zastosowania zarówno na obszarach usług (siatka statycznych terminali użytkownika), jak i wzdłuż trasy. W obu przypadkach można je zdefiniować za pomocą modułu GIS.
Trajektorie można zdefiniować poprzez wybór punktów orientacyjnych. Polaris obliczy najkrótszą trajektorię łączącą te punkty orientacyjne.
Jako że znaczna liczba zastosowań ma miejsce na obszarach miejskich, gdzie warunki dotyczące kąta maskowania mają wpływ na wydajność nawigacji, opcja symulacji środowisk 3D (a w szczególności kanionów miejskich) jest koniecznością.
Wykorzystanie danych 3D GIS może nie być uzasadnione ani konieczne w niektórych przypadkach, biorąc pod uwagę średni koszt takich map, np. przy ocenie zastosowania w typowym środowisku miejskim.
Ze względu na takie sytuacje system Polaris dysponuje narzędziem do tworzenia środowisk 3D na podstawie map 2D GIS, czyli tzw. 3D Environments Tool Lite.