Finalitza el projecte de robòtica europeu PRO-ACT
A finals d’abril i després de 27 mesos d’intens treball (14 dels quals amb condicions COVID i les seves corresponents limitacions), el projecte PRO-ACT va arribar a la seva fi.
Iniciat el 2019, PRO-ACT va ser un dels 5 projectes seleccionats perquè els financés la Comissió Europea en la segona fase de l’Strategic Research Cluster (SRC), en robòtica espacial, dins del programa europeu H2020. Amb la seva llarga experiència en el camp de la robòtica espacial, GMV ha tingut una participació destacada en aquest projecte, liderat per SpaceApps i desenvolupat per un consorci format per 10 socis.
PRO-ACT té com a principal objectiu desenvolupar i validar aplicacions per facilitar i donar suport a la preparació de futures missions tripulades a altres planetes. Per aconseguir aquest ambiciós objectiu, els robots han de ser capaços d’operar coordinadament de manera autònoma en equip per dur a terme tasques complexes, com col·laborativament mapar i preparar el terreny de la futura base o cooperativament construir infraestructures per a l’assentament humà.
Un altre objectiu de PRO-ACT era abordar el problema de l’establiment d’un precursor de base lunar mitjançant l’assemblatge d’un sistema d’extracció i utilització de recursos in situ (ISRU) amb ajuda de robots mòbils actuant cooperativament; unes capacitats que són essencials per a l’establiment de futurs assentaments humans.
En el marc d’aquest projecte s’han utilitzat tots els blocs comuns (OG1-5) desenvolupats durant la primera fase del programa (Building Blocks), fent especial menció a ERGO (controlador autònom orientat a implementar i executar objectius d’alt nivell) i ESROCOS (entorn de desenvolupament de programari per a aplicacions de control robòtic); ambdós liderats per GMV en la primera fase del clúster.
Així mateix, GMV ha liderat la definició, disseny i implementació de l’arquitectura multirobot relacionada amb la planificació, execució-coordinada i monitoratge; ha participat en el desenvolupament d’altres sistemes de suport (comunicacions, centre de control i monitoratge a terra); en la integració dels blocs comuns desenvolupats durant la primera fase, i en activitats de prova, demostració i difusió dels resultats obtinguts.
A causa de les normatives sanitàries i restriccions de viatge per tot Europa, la demostració final de les solucions desenvolupades en el marc d’aquest projecte s’han fet majoritàriament de manera remota, i s’ha ajustat cadascun dels escenaris inicialment previstos de demostració a dues àrees de tests diferents: la Sala Lunar Interior de DFKI (Alemanya) on hi havia el robot “Mantis” i a PIAP-Space (Polònia), on hi havia el robot “Veles”.
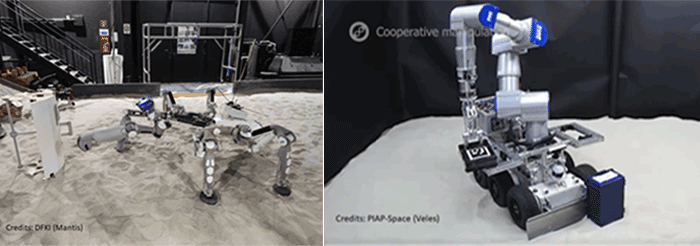
Després d’establir i configurar una xarxa virtual (VPN, Virtual Private Network) entre ambdues localitzacions i els diferents socis, el programari va ser remotament instal·lat i configurat en tots dos robots a fi de validar i demostrar el correcte enviament, planificació i execució de «cooperative goals» remotament comandats des d’una estació multirobot de control executant-se des de GMV a Espanya. Durant els tests remots, els robots Mantis i Veles simultàniament de manera autònoma van explorar el seu terreny anàleg lunar cartografiant l’entorn de manera cooperativa, i van simular tasques cooperatives de manipulació i transport d’objectes avalats per estacions de control multirobot de GMV (Espanya) i Space Applications Services (Bèlgica), validant així satisfactòriament el «Cooperative and multirobot frameworK» desenvolupat durant aquest projecte. Després d’aquestes proves, el 26 de maig va tenir lloc, de manera també remota, l’acceptació final del projecte, una fita en la qual hi van estar presents membres de la Comissió Europea (CE) i l’Agència Espacial Europea (ESA) juntament amb la resta del consorci de socis de PRO-ACT.
Després de mostrar els resultats obtinguts (presentacions, vídeos i fotos) dels tests de demostració executats a finals de maig i els resultats finals del projecte, tant la CE com l’ESA van felicitar el consorci pels resultats obtinguts en aquest ambiciós projecte, van agrair el gran treball| fet tècnicament i van ressaltar l’extra coordinació, adaptació i col·laboració de tot el consorci per la COVID.