Auf dem Weg zur Automatisierung der Vermeidung von Satellitenkollisionen mit Hilfe künstlicher Intelligenz
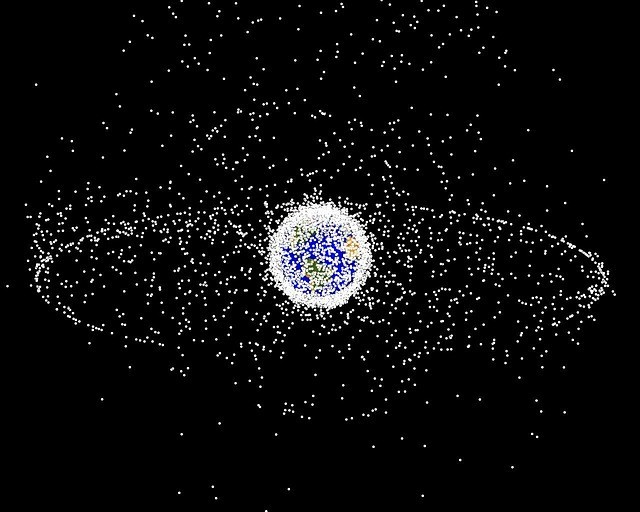
Die Bedrohung der funktionierenden Satelliten durch Weltraummüll beginnt sich zu einem ernsten Problem zu entwickeln. Derzeit sind fast 20.000 Objekte über 10 cm im erdnahen Orbit (LEO) und über 1 m im geostationären Orbit (GEO) sowie mehr als doppelt so viele kleinere Fragmente bis zu 1 cm katalogisiert.
Die 18. US-Weltraum-Kontrollstaffel (18 SPCS, ehemals JSpOC) gibt Näherungsdatenmeldungen (CDM) aus, wann immer eine enge Verbindung zwischen einem in Betrieb befindlichen Satelliten und katalogisierter Teile festgestellt wird. Diese Meldungen sind die Hauptinformationsquelle für Satellitenbetreiber, um Manöver zur Kollisionsvermeidungsmanöver einzuleiten, die das Kollisionsrisiko unter ein akzeptables Niveau senken sollen.
Diese kritischen Vorgänge lassen sich im Allgemeinen nur schwer automatisieren und erzeugen oft belastende Situationen mit komplizierten Entscheidungsverfahren, bei denen eine Vielzahl von Faktoren und unterschiedlichen Informationsquellen berücksichtigt werden müssen.
Für kleine Satellitenflotten oder solche, die in nicht sehr dicht besiedelten Regionen des Weltraums im Orbit kreisen, kann die Anzahl der Warnmeldungen durch gut etablierte Verfahren dank einem hohen Maß an manuellen Operationen relativ klein gehalten werden. Bei großen Flotten, insbesondere wenn sie in stark frequentierten Orbitalregionen operieren, kann die Zahl der Warnungen jedoch auf ein Niveau steigen, das kaum noch zu bewältigen ist.
Dies erfordert eine zumindest teilweise Automatisierung dieser Vorgänge, um die Sicherheit zu erhöhen und die Betriebskosten zu begrenzen.
GMV entwickelt zusammen mit EUTELSAT im Rahmen eines ESA-Projekts ein Autonomes Kollisionsvermeidungssystem.
Die Entscheidungsfindung bei der Kollisionsvermeidung (ob ein Manöver durchgeführt werden soll oder nicht) ist jedoch nicht leicht zu automatisieren; die Entscheidung kann nicht auf der Grundlage eines einzigen Algorithmus getroffen werden, der auf einfachen Regeln für die Eingabedaten (meist direkt aus den CDMs oder von ihnen abgeleitet) beruht.
Heute verfügen wir jedoch über eine große Menge an Informationen, die im Laufe der Zeit gesammelt und einer sorgfältigen Analyse unterzogen wurden. Diese können wir nutzen, um auf der Grundlage früherer Erfahrungen angemessene Entscheidungen für Ausweichmanöver zu treffen. Diese Informationen, die aus in realen oder simulierten Szenarien getroffenen Entscheidungen extrahiert wurden, könnten daher als Daten für das Training von Systemen mit generischen Algorithmen verwendet werden. Hier kommen dann die Konzepte der künstlichen Intelligenz und insbesondere des Maschinellen Lernens zum Tragen.
Am 3. Juni hielt ich ein Webinar über die Anwendbarkeit von Technologien der künstlichen Intelligenz und des Maschinellen Lernens zur Automatisierung des Kollisionsvermeidungsprozesses und über die neuesten Entwicklungen auf diesem Gebiet ab. GMV entwickelt zusammen mit EUTELSAT im Rahmen eines ESA-Projekts ein Autonomes Kollisionsvermeidungssystem. Dieses System basiert auf dem Einsatz von Technologien der künstlichen Intelligenz und des Maschinellen Lernens und ist sowohl für die Nutzung durch große Flotten (z. B. große Betreiber in GEO und zukünftige Megasatellitenkonstellationen in LEO und MEO) als auch für elektrische Satelliten im Orbit (z. B. Orbittransfer innerhalb von LEO zu einem höheren LEO, für den Einsatz in großen Konstellationen, oder von LEO/GTO zu GEO, im Falle eines großen Telekommunikationssatelliten) vorgesehen.

Während dieses Webinars sprachen wir über die Anwendung von Technologien der Künstlichen Intelligenz und des Maschinellen Lernens nicht nur zur Lösung dieses spezifischen Problems, sondern auch für andere Raumfahrtanwendungen wie die Automatisierung des Satellitenbetriebs, die Satellitenkommunikation, die Bordrobotik und -automatisierung, die Datenverarbeitungssysteme für Erdbeobachtungsmissionen usw., an denen GMV ebenfalls in einer Vielzahl von Aktivitäten arbeitet. Dabei hob ich die umfassende Erfahrung der IT-Abteilung von GMV in den Bereichen Künstliche Intelligenz, Makrodaten und Datenwissenschaften hervor, dank der wir Synergien nutzen und diese Technologien auf die Bereiche Raumfahrt und Verteidigung anwenden können.
Das war ein sehr interessanter Austausch, und ich möchte mich dafür bei meinen auf diesem Gebiet tätigen Kollegen von GMV (siehe erste Folie) sowie bei allen Teilnehmern des Webinars bedanken, insbesondere auch für die interessanten Fragen, die gestellt wurden.
Über den folgenden Link können sie sich das komplette Webinar (auf Englisch) anschauen, falls Sie es verpasst haben sollten. Wenn Sie mehr Interesse an diesem Thema haben und Ideen austauschen möchten oder nach einer Zusammenarbeit suchen, kontaktieren Sie mich bitte (über meine folgende E-Mail-Adresse oder direkt in der Präsentation). Vielen Dank!
Autor: Alberto Águeda
[email protected]