Das europäische Robotik-Projekt PRO-ACT läuft aus
Ende April und nach 27 Monaten intensiver Arbeit (14 davon mit COVID-Bedingungen und den entsprechenden Einschränkungen) ging das Projekt PRO-ACT zu Ende.
PRO-ACT wurde 2019 als eines der 5 Projekte ausgewählt, die von der Europäischen Kommission in der zweiten Phase des Strategischen Forschungsclusters (SRC) im Bereich Weltraumrobotik im Rahmen des europäischen Programms H2020 gefördert werden. Mit seiner langjährigen Erfahrung auf dem Gebiet der Weltraumrobotik hat GMV eine führende Rolle in diesem Projekt gespielt, das von SpaceApps geleitet und von einem Konsortium aus 10 Partnern durchgeführt wurde.
Das Hauptziel von PRO-ACT ist die Entwicklung und Validierung von Anwendungen, die die Vorbereitung zukünftiger bemannter Missionen zu anderen Planeten erleichtern und unterstützen. Um dieses ehrgeizige Ziel zu erreichen, müssen Roboter in der Lage sein, autonom und in Teams zu arbeiten, um komplexe Aufgaben zu erfüllen, wie z. B. die kollaborative Kartierung und Vorbereitung des Geländes der zukünftigen Basis oder der kooperative Aufbau der Infrastruktur für die menschliche Besiedlung. Ein weiteres Ziel von PRO-ACT war es, das Problem der Errichtung einer Vorläuferbasis auf dem Mond durch den Aufbau eines In-Situ-Ressourcenextraktions- und -nutzungssystems (ISRU) mit Hilfe von kooperativ agierenden mobilen Robotern anzugehen; Fähigkeiten, die für die Errichtung zukünftiger menschlicher Siedlungen unerlässlich sind.
Im Rahmen dieses Projekts wurden alle gemeinsamen Blöcke (OG1-5) verwendet, die in der ersten Phase des Programms entwickelt wurden. Besonders hervorzuheben sind ERGO (autonomer Controller, der auf die Implementierung und Ausführung von High-Level-Zielen ausgerichtet ist) und ESROCOS (Software-Entwicklungsumgebung für Robotersteuerungsanwendungen); beide wurden von GMV in der ersten Phase des Clusters geleitet.
GMV war auch federführend bei der Definition, dem Design und der Implementierung der Multi-Roboter-Architektur in Bezug auf Planung, Ausführungskoordination und Überwachung; beteiligte sich an der Entwicklung anderer Unterstützungssysteme (Kommunikation, Kontrollzentrum und Bodenüberwachung); an der Integration der gemeinsamen Blöcke, die während der ersten Phase entwickelt wurden; und an Test-, Vorführungs- und Verbreitungsaktivitäten der erzielten Ergebnisse.
Aufgrund von Gesundheitsbestimmungen und Reisebeschränkungen in ganz Europa wurde die abschließende Vorführung der im Rahmen dieses Projekts entwickelten Lösungen größtenteils aus der Ferne durchgeführt, wobei jedes der ursprünglich geplanten Vorführungsszenarien an zwei verschiedene Testbereiche angepasst wurde: den Indoor-Mondraum am DFKI (Deutschland), wo sich der Roboter "Mantis" befand, und am PIAP-Space (Polen), wo sich der Roboter "Veles" befand.
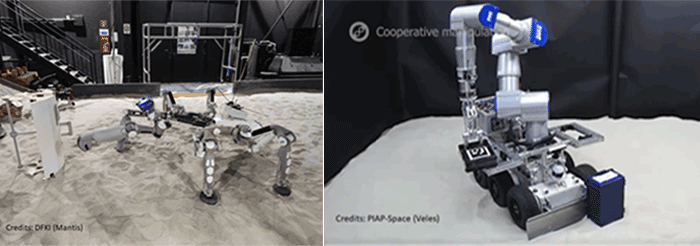
Nach der Einrichtung und Konfiguration eines Virtual Private Network (VPN) zwischen den beiden Standorten und den verschiedenen Partnern wurde die Software per Fernzugriff in beiden Robotern installiert und konfiguriert, um das korrekte Senden, Planen und Ausführen von «cooperative goals» zu validieren und zu demonstrieren, die von einer Multi-Roboter-Steuerungsstation aus ferngesteuert werden, die von GMV in Spanien aus läuft. Während der Ferntests erkundeten die Roboter Mantis und Veles gleichzeitig und autonom ihr mondanaloges Terrain, kartierten die Umgebung auf kooperative Weise und simulierten kooperative Aufgaben der Manipulation und des Transports von Objekten, unterstützt durch Multi-Roboter-Kontrollstationen von GMV (Spanien) und Space Applications Services (Belgien), und validierten so erfolgreich den im Rahmen dieses Projekts entwickelten «Cooperative and multi-robot frameworK» .
Nach diesen Tests fand am 26. Mai, ebenfalls per Fernsteuerung, die Endabnahme des Projekts statt, ein Meilenstein, an dem Mitglieder der Europäischen Kommission (EC) und der Europäischen Weltraumorganisation (ESA) zusammen mit den übrigen Partnern des PRO-ACT-Konsortiums teilnahmen. Nach der Vorstellung der Ergebnisse (Präsentationen, Videos und Fotos) der Ende Mai durchgeführten Demonstrationstests und der Endergebnisse des Projekts beglückwünschten sowohl die EK als auch die ESA das Konsortium zu den in diesem ehrgeizigen Projekt erzielten Ergebnissen, dankten für die technisch geleistete großartige Arbeit und hoben die zusätzliche Koordination, Anpassung und Zusammenarbeit des gesamten Konsortiums aufgrund von COVID hervor.