EROSS tests validate the on-orbit servicing technology
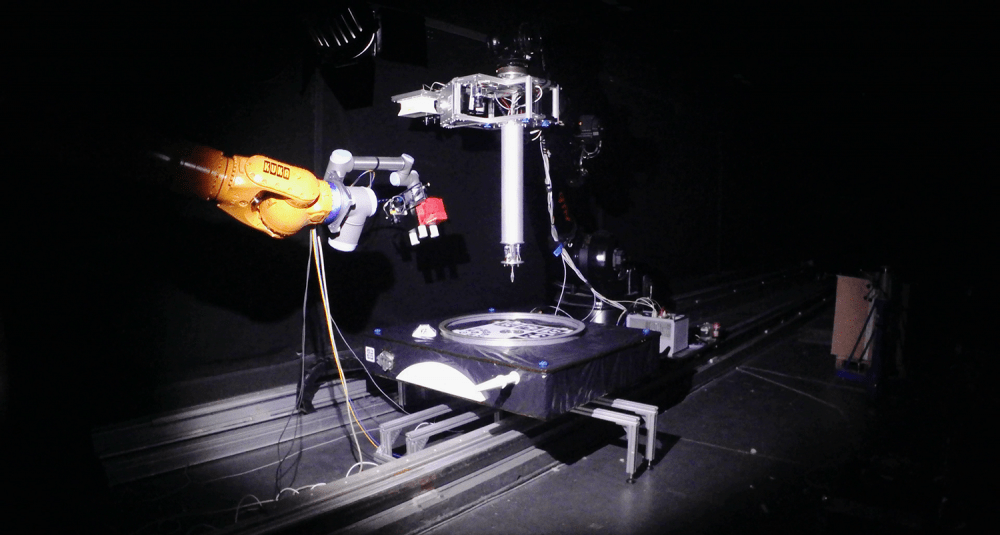
Last April the testing campaign to validate the H2020 EROSS project´s technologies was conducted in GMV´s Platform-art© robotic testbed.
The objective of European Robotic Orbital Support Services (EROSS) is to demonstrate European solutions for the Servicer and the Serviced LEO/GEO satellites, enabling a large range of efficient and safe orbital support services. The project assesses and demonstrates the capability of the on-orbit servicing spacecraft to perform rendezvous, capture, berthing and manipulation of a collaborative client satellite provisioned for servicing operations including refueling and payload transfer/replacement. This project is developing and merging the building blocks of the previous Operational Grants from 1 to 6 of the Strategic Research Clusters on Space Robotics within the Horizon 2020 programme, three of them led by GMV from 2016 to 2019.
Thales Alenia Space, as project coordinator, is leading the mission and system designs within the overall GNC architecture and its validation on robotic testbeds. In the EROSS project, GMV is supporting the integration of the building blocks from previous Operational Grants, i.e. ESROCOS (OG1) and ERGO (OG2). In particular GMV is inputting the design of the satellite guidance function for rendezvous, capture, docking and servicing operations and supporting Thales Alenia Space in France in the GNC and Autonomy validation. GMV is also providing support for inclusion of the ESA ASSIST refueling interface device within the EROSS demonstration. Moreover, GMV’s Platform-art© is the proposed test facility for the overall EROSS demonstration.
The validation result was excellent and highlighted the efforts over the last 2 years, through the Covid outbreak and the countless technical challenges. During platform-art testing activities EROSS’s visual-based GNC for rendezvous operations was validated in closed loop including the autonomous management of a contingency scenario during the approach. Capture operations using a gripper, docking operations with ESA ASSIST breadboard and servicing operations like orbital replaceable unit exchange using SIROM were also validated in open loop.
The Platform-art© facility enabled us to step up the technology readiness level of EROSS software and hardware elements in a space-representative scenario for on-orbit servicing operations based on visual navigation, promoting the autonomous activation of the different phases to accomplish the mission.
During late May and early June, additional testing activities are planned in NTUA, PIAP and TASF facilities to demonstrate the capabilities of on-orbit servicing technologies developed in EROSS.
| This project has received funding from the European Union’s Horizon 2020 research and innovation programme under grant agreement No 821904 |