The European robotics project PRO-ACT is completed
In late April, after 27 action-packed months (14 of them in COVID lockdown), the PRO-ACT project was brought to completion.
Kicking off back in 2019, PRO-ACT was one of the 5 projects selected for European-Commission funding in the second phase of the H2020 space robotics Strategic Research Cluster (SRC). Drawing on its wealth of experience in space robotics, GMV featured prominently in PRO-ACT, led by SpaceApps and carried out by a 10-member consortium.
PRO-ACT’s main remit was to design, develop and validate applications to facilitate and support the preparation of future manned missions to other planets. In pursuit of this ambitious goal the robots have to be capable of working autonomously and coordinatedly in a team to perform complex tasks such as collaboratively mapping and preparing the terrain of the future base or cooperatively building human settlements. Another of PRO-ACT’s goals was to address the problem of setting up a precursor lunar base by assembling an in-situ resource utilization (ISRU) system, doing so with the aid of cooperatively acting mobile robots. These capabilities will be essential for the establishment of future human settlements.
PRO-ACT used all the common building blocks (OG1-5) developed during the first phase of the program, mentioning the European Robotic Goal-oriented Autonomous Controller (ERGO) and the European Space Robot Control Operating System (ESROCOS); the two GMV-led building blocks in the cluster’s first phase.
GMV also led the definition, design and implementation of the multi-robot architecture related to planning, execution, coordination and monitoring, while participating too in the development of other support systems (communications, control center and ground monitoring), in the integration of common building blocks developed in the first phase plus testing and demonstration activities and bringing results to wider notice.
Due to the Europe-wide COVID lockdown restrictions the final demo of the project solutions was mainly carried out remotely, adjusting each one of the initially scheduled demo sites to two different testing areas: DFKI’s Interior Lunar Room in Germany, using the “Mantis” robot and PIAP-Space in Poland, using the “Veles” robot.
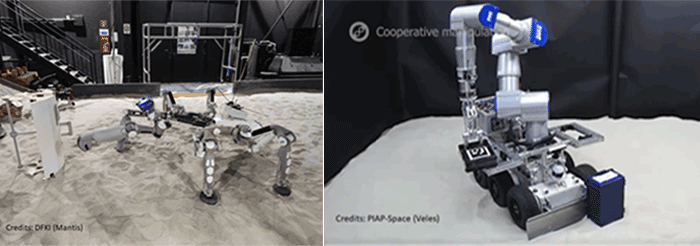
After setting up and configuring a Virtual Private Network (VPN) between both sites and the various partners, the software was remotely installed and configured in both robots to check the correct sending, planning and execution of cooperative goals commanded remotely from a multi-robot control station run by GMV in Spain. During the robot tests the Mantis and Veles robots simultaneously and autonomously explored their moonlike terrain, mapping the environment cooperatively, synching too cooperative object-manipulation and -conveyance tasks, supported by multi-robot control stations of GMV in Spain and Space Applications Services in Belgium, checking that PRO-ACT’s Cooperative and multi-robot framework worked properly.
After this test the final project acceptance was held remotely on 26 May, with the presence of members of the European Commission (EC) and European Space Agency (ESA) together with PRO-ACT’s other consortium members. After demonstration to the EC and ESA of the results (presentations, videos and photos) of the demonstration tests held in late May and the final project results, the consortium was congratulated for the achievements of this ambitious project and thanked for its technological prowess, stressing the extra coordination, adaptability and collaboration of the whole consortium to cope with the COVID lockdown.