HRAF exploration

All planned exploration missions to the Moon and beyond rely on autonomous components. Landing on the Moon, Mars and asteroids, rendezvousing and docking in space and surface exploration rovers without human control are all necessary to make these future missions possible. And ensuring autonomy on these missions calls for a host of testing, validation and verification. Initially these tests are carried out in model-in-loop software, then deployed to the representative computer called processor-in-loop and finally tested with hardware components such as sensors and actuators, hardware-in-loop.
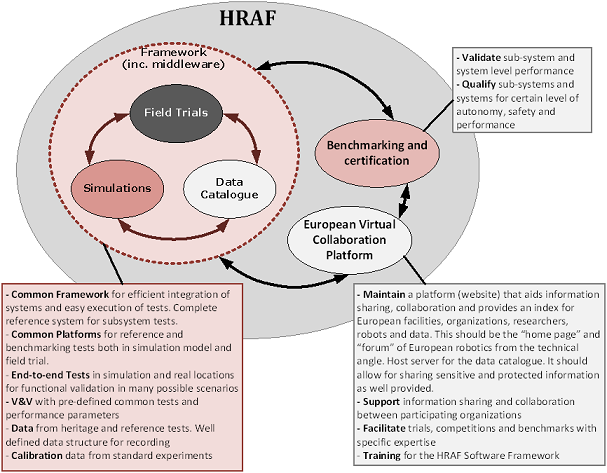
The aim of the Harwell Robotics and Autonomy Facility (HRAF) is to support the integration, verification and validation of autonomy systems and associated technologies from unit up to mission level. This requires the use of specialist test facilities including mock planetary surfaces, software-based simulation environments and physical field trials in representative environments to provide ground truth. This will speed-up and improve the efficiency of autonomous robot deployment in real environments to complete tasks and achieve missions robustly.
Building software able to complete these missions autonomously is complex; building simulators that are able to test the autonomy software is just as complex. Two aspects are crucial in in coping with this complexity; namely, modular systems and graphical design of the system architecture, called model-based systems engineering. The autonomy software and simulation components are designed in a standard format called SysML using a graphical tool. This enables the designer to see the full picture and understand the interactions between each component and make modifications quickly. This model is then used to automatically generate code that can be used directly in each component to set up the interfaces. This is achieved by using a middleware that enables standardized communication between software components. In this project the middleware used is High Level Architecture (HLA).
The HRAF Exploration project currently being developed by GMV has two main goals:
The first goal is the development and validation of a model-driven High-level Architecture Distributed Simulation (HLA-DS) Engineering Framework for supporting semi-automated generation of the Federation Object Model (FOM) for any space domain. This uses SysML models for the design of the system, which is then converted into a SpaceFOM-compliant HLA FOM from which the HLA adaptor code is generated;
The second goal is the addition of the Exploration Federation and testing the model-driven methodology and the HLA-DS in 2 scenarios: Mars orbit rendezvous and asteroid landing. These scenarios, calling for a high degree of automation, will be tested in simulation and with hardware-in-loop test facilities.
This Exploration federation however mainly proves how the HRAF framework can help to efficiently re-use testing software components and to efficiently design new autonomy systems. This is just the start for the HRAF framework, however; this model drive concept can be used to design other scenarios and even design entire missions. Because of the common middleware the simulator created from the model can run across different software components even when they are not open source. Different organisations in different countries can manage any network latency. An overview of HRAF is given in the picture below.
Ultimately HRAF aspires to be a useful tool that organizations can use to validate their autonomy software; this in turn will speed up development of autonomy software and create more robust software for future exploration missions.
Tests where representative computers and sensors are used will be completed at GMV’s Platform Art facility.
Author: Aron Kisdi