El proyecto de exploración HRAF

Todas las misiones planificadas de exploración a la Luna y a otros lugares del espacio dependen de componentes autónomos. El aterrizaje en la Luna, en Marte y en asteroides, las maniobras de aproximación y acoplamiento en el espacio y los róveres de exploración de superficie sin control humano son necesarios para hacer posible esas misiones futuras. Y garantizar la autonomía de esas misiones exige la realización de multitud de ensayos y de actividades de validación y verificación. Estos ensayos comienzan mediante la utilización de modelos para pruebas en entorno de simulación software in the loop; a continuación, se trasladan al ordenador representativo, llamado processor-in-loop y, por último, se someten a prueba por medio de componentes hardware como sensores y actuadores, el hardware-in-loop.
El propósito del centro Harwell Robotics and Autonomy Facility (HRAF) es dar soporte a la integración, verificación y validación de sistemas autónomos y de las tecnologías asociadas, desde el nivel de prototipo al de misión. Para ello es preciso el uso de instalaciones de ensayo especializadas que permitan la simulación de escenarios de exploración de superficies planetarias y contengan entornos de simulación basados en software y espacio para pruebas físicas de campo en entornos representativos, todo ello con el fin de obtener información empírica. De este modo se acelerará y mejorará la eficiencia del desempeño de los robots autónomos en medios reales para el desarrollo de tareas y el cumplimiento con éxito del objeto de la misión.
Crear software capaz de llevar a cabo esas misiones de manera autónoma es una labor compleja; también lo es el desarrollo de simuladores para probar ese software. Dos aspectos son cruciales a la hora de abordar esa complejidad: los sistemas modulares y el diseño gráfico de la arquitectura del sistema, también llamado ingeniería de sistemas basada en modelos. El software de autonomía y los componentes para simulaciones están diseñados en un formato estándar llamado SysML, mediante una herramienta gráfica. De este modo, el diseñador puede ver la imagen completa, comprender las interacciones entre cada componente y realizar rápidamente cualquier modificación necesaria. Diseñado el modelo, se utiliza para generar automáticamente código que pueda emplearse directamente en cada componente para la configuración de las interfaces y a tal fin se utiliza un middleware que permite comunicación estandarizada entre los componentes del software. En este proyecto, el middleware empleado es High Level Architecture (HLA).
El proyecto HRAF Exploration que está siendo desarrollado actualmente por GMV tiene dos objetivos principales:
El primer objetivo es el desarrollo y la modelización de un marco de ingeniería para simulación distribuida basada en arquitectura de alto nivel (HLA-DS) que dé soporte a la generación semiautomática del modelo de objetos de federación (FOM) en cualquier ámbito del espacio. Se utilizan modelos SysML para el diseño del sistema, el cual se convierte a continuación en un FOM basado en HLA compatible con SpaceFOM, a partir del cual se genera el código HLA de adaptación.
El segundo objetivo es la incorporación de la Federación de Exploración y la comprobación de la metodología basada en modelos y la HLA-DS en dos escenarios: aproximación en la órbita de Marte y aterrizaje en asteroide. Estos escenarios, que exigen un alto grado de automatización, se someterán a pruebas de simulación y con medios de ensayo hardware-in-loop.
Esta federación de exploración demuestra principalmente de qué forma el marco HRAF puede ayudar a reutilizar de manera eficiente componentes de software de prueba y a diseñar también eficientemente nuevos sistemas de autonomía. No obstante, esto es solo el principio del marco HRAF: este concepto basado en modelos puede utilizarse para diseñar otros escenarios e incluso misiones enteras. Debido a la utilización de un middleware común, el simulador creado a partir del modelo puede ejecutarse en diferentes componentes de software, aun cuando no fueran de código abierto. Organizaciones diversas de diferentes países pueden administrar cualquier latencia de red. En la figura siguiente se muestra una descripción general del HRAF.
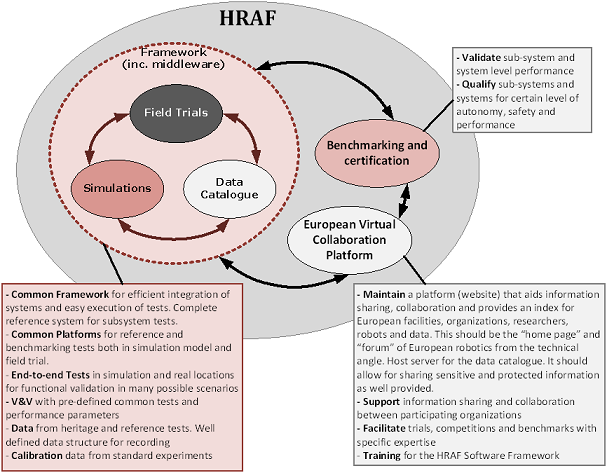
[Marco (incl. middleware): Pruebas de campo à Simulaciones à Catálogo de datos
– Marco común para la integración eficiente de sistemas y fácil ejecución de pruebas. Sistema completo de referencias para pruebas de subsistemas.
– Plataformas comunes para referencia y pruebas de comparativa tanto en modelo de simulación como de prueba de campo.
– Pruebas de principio a fin en simulación y localización real para validación funcional en muchos escenarios posibles.
– Validación y verificación con pruebas comunes predefinidas y parámetros de rendimiento.
– Datos de pruebas heredadas y de referencia. Estructura de datos bien definida para registro.
– Datos de calibración procedentes de experimentos estándar.]
[Comparativa y certificación]
– Validación del rendimiento del nivel de sistemas y subsistemas.
– Clasificación de sistemas y subsistemas según nivel de autonomía, seguridad y rendimiento. ]
[Plataforma Virtual Europea de Colaboración]
– Mantener una plataforma (sitio web) que ayude a compartir información y colaborar y proporcione un índice de instalaciones, organizaciones, investigadores, robots y datos europeos. Esta sería la “página de inicio” y el “foro” de robótica europea desde la perspectiva técnica. Un servidor de alojamiento para el catálogo de datos, que permita compartir información sensible y protegida proporcionada.
– Dar soporte al intercambio de información y la colaboración entre organizaciones participantes.
– Facilitar pruebas, concursos y comparativas con conocimientos específicos.
– Dar formación en el Marco de Software HRAF.]
En definitiva, HRAF aspira a ser una herramienta útil que las organizaciones puedan utilizar para validar su software de autonomía y, de ese modo, acelerar su desarrollo y crear un software más robusto para futuras misiones de exploración.
Se llevarán a cabo pruebas en las que se utilizarán ordenadores representativos y sensores en el laboratorio dinámico Platform Art de GMV.
Autor: Aron Kisdi