O software, a chave do veículo do futuro
O mundo do automóvel está em contínua transformação e durante os últimos anos está a focalizar-se principalmente nos veículos conectados e autónomos.
Os veículos estão a sofrer uma grande evolução e cada dia oferecem novas funcionalidades, têm maior complexidade e requerem maiores medidas de segurança. Tudo isto é conseguido através da inclusão de novos serviços e funcionalidades SW. Alguns estudos já constataram que, na última década, as linhas de código presentes nos veículos se multiplicaram por mais de 10.
O software está a assumir tarefas cada vez mais importantes no automóvel, facilitando o intercâmbio de dados com outros utilizadores da estrada e com a infraestrutura, a atualização dos veículos a partir da nuvem e, de forma progressiva, a chegada da condução autónoma.
Este protagonismo cada vez maior que o software está a adquirir no veículo, com o incremento do número de linhas de código e da complexidade associada às diferentes funções do veículo, faz com que se requeira maior potência de cálculo e integração.
Esta evolução dos desenvolvimentos SW está a fazer com que também se produza uma evolução e transformação na arquitetura elétrica e eletrónica dos veículos.
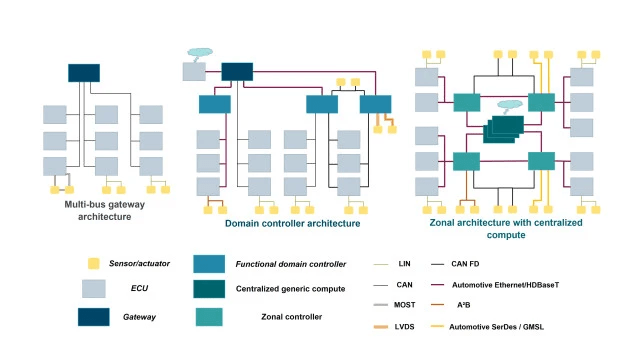
Esta começou por ser uma arquitetura distribuída, na qual se dispunha de uma ECU (Electronic Control Unit) para cada serviço ou funcionalidade, que se instalava no veículo e se interconectava com outras ECU, no caso de ser necessário, apesar de na maioria das situações a interação entre elas ser escassa. Cada uma destas ECU era composta pelo seu próprio HW e SW, com uma arquitetura, na maioria dos casos, totalmente diferente e personalizada para as diferentes plataformas disponíveis. Isto já não só implicava uma grande complexidade e dificuldade no momento de manter e resolver problemas nos veículos, mas também provocava uma grande dificuldade quando se tratava de reutilizar muitos desenvolvimentos SW entre diferentes veículos ou fabricantes.
Vendo que esta complexidade tenderia a ser cada vez maior, começou a levar-se a cabo o estudo de arquiteturas alternativas, que foram definindo a evolução arquitetónica do automóvel. O primeiro passo foi criar redes específicas com aquelas ECU que precisavam de comunicar entre si ou que estavam no âmbito de funcionalidades específicas, constituindo o que se conhece como uma arquitetura centralizada de domínios. As ECU de Domínio conectam-se às diferentes ECU funcionais mediante o bus CAN e uma conexão Ethernet. Esta arquitetura suporta funções mais complexas, tem maior flexibilidade e uma rede de comunicações de maior velocidade.
Com vista ao futuro, está-se a trabalhar na definição de arquiteturas por zonas, que pode solucionar os problemas da arquitetura de domínio ao agrupar ECU que se encontram fisicamente perto sob um só controlador de zona. Esta unidade age como mestre para processar todos os dados que provêm das diferentes zonas. A unidade central e as ECU estão conectadas através de uma conexão Ethernet.
O conceito de arquiteturas E/E por zonas desvincula completamente as funcionalidades SW do hardware. Estas funcionalidades ou componentes SW podem ser executadas em servidores remotos localizados na nuvem, quer seja associadas a tarefas específicas ou sob pedido. Esta mudança de paradigma nas arquiteturas abre novas perspetivas e facilita um número de opções virtualmente ilimitado.
Outro inconveniente que se apresentou com toda a evolução que as arquiteturas estão a sofrer é a diversidade de plataformas HW e de sistemas operativos (OS) utilizados por cada uma das ECU. Isto levou diferentes OEM a procurar novas estratégias com o objetivo de minimizar desenvolvimentos, aumentar a portabilidade e reutilização do SW. Esta estratégia consiste na criação de capas de abstração, conseguindo desta forma desenvolvimentos SW independentes, tanto do HW como do OS usado, podendo assim conseguir plataformas standard que podem ser utilizadas em diferentes veículos. Estas capas de abstração também proporcionam outras vantagens como: facilitar os novos desenvolvimentos, uma vez que reduz a sua complexidade e tempo de desenvolvimento e integração, reduzir o tempo dedicado à manutenção e à correção de erros. Podemos encontrar alguns exemplos na Mercedes com MB.OS, um sistema operativo baseado em dados e atualizável de forma simples, que irá estabelecer a conexão do automóvel com a nuvem, ou Volkswagen com VW.OS, que será mais simples e intuitivo e que irá facilitar em grande medida as atualizações remotas.
O mundo do automóvel está numa evolução e desenvolvimento contínuo e o conjunto de desafios promete crescer nos próximos anos. O até há muito pouco presidente da Volkswagen, Herbert Diess, estimava que "o software irá representar 90% das futuras inovações no automóvel". Segundo palavras de Zoran Filipi, presidente do Departamento de Engenharia Automotora do Centro Internacional de Investigação Automotora da Universidade de Clemson, "nenhuma outra indústria está a sofrer uma mudança tecnológica tão rápida como a indústria automóvel" e o software está a desempenhar um papel fundamental nesta revolução.
Desde há já mais de 18 anos que a GMV trabalha com diferentes OEM e fornecedores Tier-1 e desenvolve uma sólida experiência em engenharia de software para automóvel, levando a cabo desenvolvimentos em conformidade com os mais exigentes standards requeridos no software automotor (como Automotive SPICE CL3) e trabalhando sobre diferentes plataformas e Sistemas Operativos, o que nos permite ser parte do automóvel do presente e do automóvel do futuro.
Autor: Beatriz García Navarro