GMV an der Spitze der Technologieentwicklung für die autonomen und vernetzten Fahrzeuge der Zukunft
ALSA, GMV, INDRA, MASERMIC, MAS MÓVIL, RENAULT GROUP und SIGMA haben das Projekt R3CAV ins Leben gerufen, mit dem sich die Projektpartner als Technologieführer bei der Entwicklung der autonomen und vernetzten Fahrzeuge der Zukunft aufstellen
Zu den Initiativen, an denen bereits gearbeitet wird, gehören ein autonomes Fahrzeug für die Nutzung im industriellen Umfeld des Renault-Werks in Palencia sowie verschiedene Tests von Konnektivitätssystemen in hochautomatisierten Fahrzeugen des ÖPNV in der Stadt Alcobendas (Madrid)
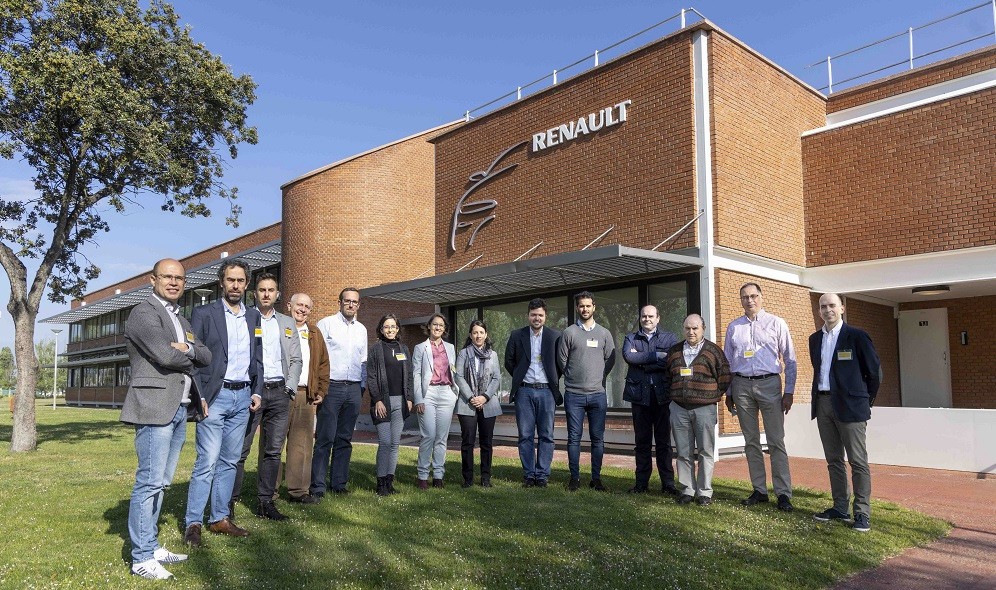
Nach einem von der Pandemie geprägten Start trafen sich die Partner zum ersten Mal bei einem ersten Arbeitstreffen im F+E+I-Zentrum der Renault-Gruppe in Valladolid zu einer Präsenzsitzung, um das ehrgeizige Projekt weiter voranzutreiben. Es ist Teil des Nationalen Plans für Wiederaufbau, Wandel und Resilienz und wird aus Mitteln der EU-Fonds „Next Generation“ zur Entwicklung relevanter Technologien für die Anwendung im Automobilsektor finanziert. Die Mittel sollen die rasche Erholung der Branche durch Stärkung der Innovationsfähigkeit befördern und einen Beitrag zur Bewältigung der Zukunftsaufgaben wie nachhaltige Mobilität, Emissionsfreiheit und vernetztes, autonomes Fahren leisten.
ALSA, GMV, INDRA, MASERMIC, MAS MÓVIL, RENAULT GROUP und SIGMA sind die Betreiber des R3CAV-Projekts (Robust, Reliable and Resilient Connected and Automated Vehicle for People Transport), das die Entwicklung einer neuen, anpassungsfähigen Hard- und Softwarearchitektur für autonome und vernetzte Fahrzeuge vorsieht, die mit unterschiedlichen Autonomiestufen betrieben werden können.
Das Projekt konzentriert sich vor allem auf zwei Anwendungsfälle: Da ist zunächst die Entwicklung eines autonomen Fahrzeugprototyps in einer kontrollierten industriellen Umgebung, die im Renault-Werk in Palencia durchgeführt wird. Der zweite Schwerpunkt umfasst den Test von Konnektivitätssystemen sowohl in Renault-Fahrzeugen als auch in hochautomatisierten Fahrzeugen für den Personentransport in Alcobendas.
Konkret stehen bei dem Projekt folgende drei Aufgaben im Mittelpunkt:
- Entwicklung eines neuen Prototyps der Stufe L4: hochautomatisierte Fahrzeuge, die in kontrollierten Umgebungen eingesetzt werden können und in der Lage sind, unterstützt durch eine fortgeschrittene Infrastruktur als redundante Informationsquelle komplexe Interaktionen mit ihrer Umgebung zu bewältigen.
- Entwicklung einer neuen autonomen und vernetzten E-Fahrzeugplattform für den zukünftigen Einsatz als anpassungsfähiges und modulares Shuttle für den Personentransport im städtischen Linienverkehr, dessen Automatisierungsgrad schrittweise von L2 (fortgeschrittene Fahrassistenzsysteme) auf L3 (mit geringer Überwachung) gesteigert werden kann.
- Entwicklung der 5G-Kommunikationstechnologie für vernetzte Fahrzeuge, z. B. für fortschrittliche Fahrerassistenzsysteme. Ziel dieser Aufgabe ist es, den Fahrer zu informieren und die sinnvollsten Maßnahmen zu empfehlen, wobei er ggf. jederzeit die Kontrolle über das Fahrzeug übernehmen kann.
Unterstützt wird das Projekt in seiner Arbeit von sieben hochrangigen Forschungszentren, darunter vier Universitäten (UPM, UC3M, UMU und UMH) und drei Technologiezentren. Das F+E+I-Zentrum der Renault-Gruppe in Valladolid, in dem mehr als 1.000 Ingenieure beschäftigt sind, ist dabei die federführende Operationsbasis des Projekts.
Die Rolle von GMV im Projekt
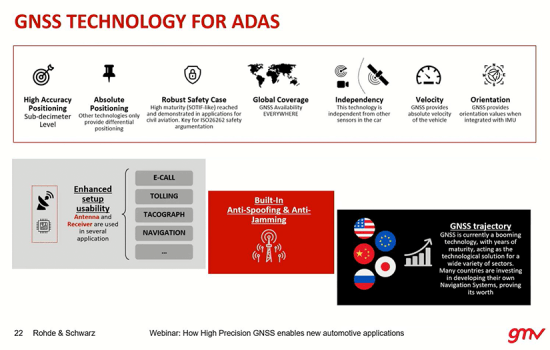
GMV wird sich auf drei verschiedenen Feldern in das Projekt einbringen, darunter die Optimierung von GNSS-basierten absoluten Positionierungssystemen in autonomen Systemen und in kooperativen Diensten, die Untersuchung der an die Infrastruktur angebundenen Dienste mit dem Ziel der Entwicklung eines intelligenten Geschwindigkeitskontrollmoduls auf der Grundlage der V2X-Technik und kooperativen C-ITS-Diensten sowie die Cybersicherheit im Fahrzeug über das Design und die Entwicklung eines Fahrzeugschutzsystems zur Erkennung von Eindringlingen auf der Grundlage von IDPS-Algorithmen und die Sicherung der V2X-Kommunikation.
„GMV verfügt über ein auf Automobilsoftware spezialisiertes Ingenieurteam mit umfassender Erfahrung in der Entwicklung von Lösungen für autonome und vernetzte Fahrzeuge. Die bereitgestellte Software soll die Systeme für die Fahrzeuge liefern, die eine Verwirklichung des autonomen und vernetzten Autos erst möglich machen. Das bahnbrechende Projekt ist eine großartige Gelegenheit, die Entwicklung dieser Lösungen und Systeme in Zusammenarbeit mit den innovativsten privaten und öffentlichen Akteuren, Unternehmen und Forschungszentren der Branche weiter voranzutreiben“, so Sara Gutiérrez Lanza, Leiterin des GMV-Geschäftsbereichs Automotive.
Mehr info: