
Kürzlich wurde im Platform-art®, dem Robotiklabor von GMV, die Bodentest- und -validierungsphase des Projekts MIRROR (Multi-arm Installation Robot for Readying ORUs and Reflectors) abgeschlossen, das unter der Leitung von GMV für die Europäische Raumfahrtagentur durchgeführt wird.
MIRROR hat die Mission, ein Robotiksystem für den Betrieb in der Umlaufbahn zu entwerfen, um dort Satelliten mit einem breiten Spektrum operativer Missionen zu montieren, zu reparieren, zu warten und ihre Leistungen zu verbessern. Projekte der Weltraum-Robotik sind für die Zukunft des Sektors entscheidend, zumal ihr Ziel darin besteht, Mechanismen zu entwickeln, die den Bau großer Strukturen in der Umlaufbahn wie Reflektoren für Teleskope oder Kraftwerken zur Erzeugung von Solarenergie sowie das nachhaltige Management des Weltraums durch Reparatur und Modernisierung von Satelliten ermöglichen.
In den Anfangsphasen übernahm GMV die Bestimmung der Anforderungen an Herstellung, Montage und Integration. In der letzten Phase entwickelte GMV nun den Prüfstand und validierte in einer Laborumgebung (am Boden) den Prototyp der Robotikplattform der neuesten Generation, die für die Montage von Strukturen in der Erdumlaufbahn ausgelegt ist. Die Tests waren erfolgreich und haben gezeigt, dass das Konzept realisierbar ist, so dass nun die nächste Entwicklungsphase eingeleitet werden kann, um die gleichen Fähigkeiten in realen Erdumlauftests zu demonstrieren.
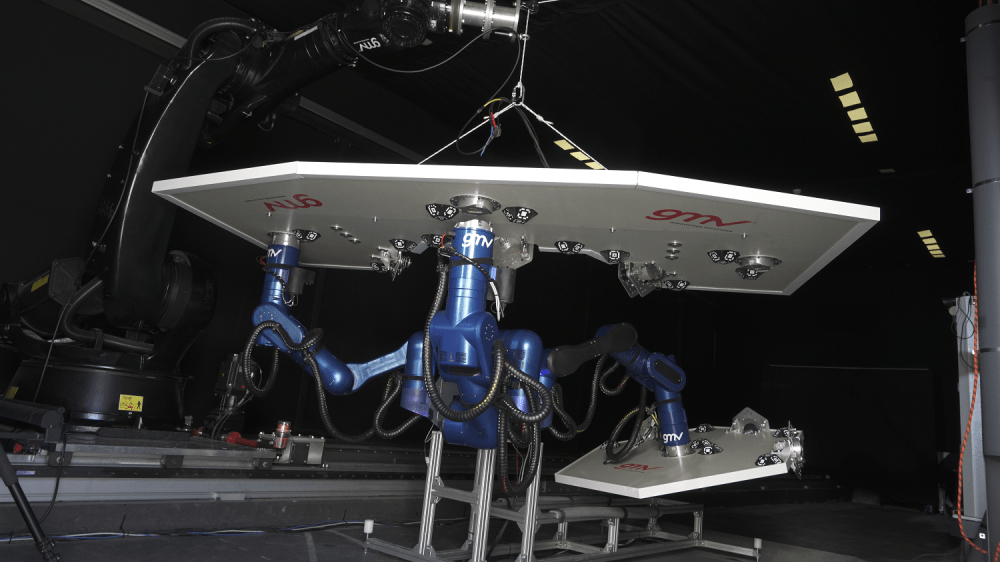
Diese von GMV entwickelte Plattform ist ein autonomer Roboter mit drei Armen, die er sowohl zum Manipulieren und Montieren von Strukturmodulen als auch zum Umhergehen um die zu montierende Struktur verwendet, während er ein gleichzeitig ein Modul zu seinem Montageort transportiert. Dank dieses einzigartigen Merkmals kann er Strukturen ohne Größenbeschränkung montieren.
MIRROR verfügt zudem über ein präzises visuelles System, das aus Kameras in der Nähe der Greifer an den einzelnen Armen zusammen mit ihren Bildverarbeitungsalgorithmen besteht. Mit seinen drei Greifern kann er nicht nur Module handhaben und sich fortbewegen, sondern auch Energie beziehen, kommunizieren und Montagewerkzeuge einsetzen.
Hervorzuheben ist die von GMV im Rahmen dieses Projekts entwickelte Lösung zur Automatisierung des gesamten Montageprozesses. Dabei handelt es sich um ein fortgeschrittenes Teilsystem, das gewährleistet, dass sich das Steuersystem trotz der Unsicherheit bei der Position an den Greifpunkten selbst fortbewegen, Module montieren und sogar eventuell auftretende Fehler erkennen und bei Störungen Arbeitsgänge wiederholen kann. Das Projekt umfasst ebenfalls ein Kontrollzentrum, über das der Roboter unter Anwendung verschiedener Autonomiestufen gesteuert werden kann.
Aufgrund all dieser Merkmale stellt MIRROR ein sehr vielseitiges System dar, das den Weg hin zu neuen Anwendungen frei macht, die bei den wichtigsten Weltraumagenturen sowie in der Luft- und Raumfahrtindustrie auf wachsendes Interesse stoßen. Dies gilt für die Stromerzeugung im Orbit für die Nutzung am Boden durch Solarpaneele oder für große Teleskope zur Erforschung des Kosmos und sogar für die Schaffung großer orbitaler Telekommunikationsplattformen.

